программы и схемы подключения
вы можете выбрать любую платформу для создания вашего робота-машинки)
вам понадобится:
- шасси , любое. можно даже использовать кусок фанеры или пластика и приклеить моторчики и другие части с помощью клеевого пистолета



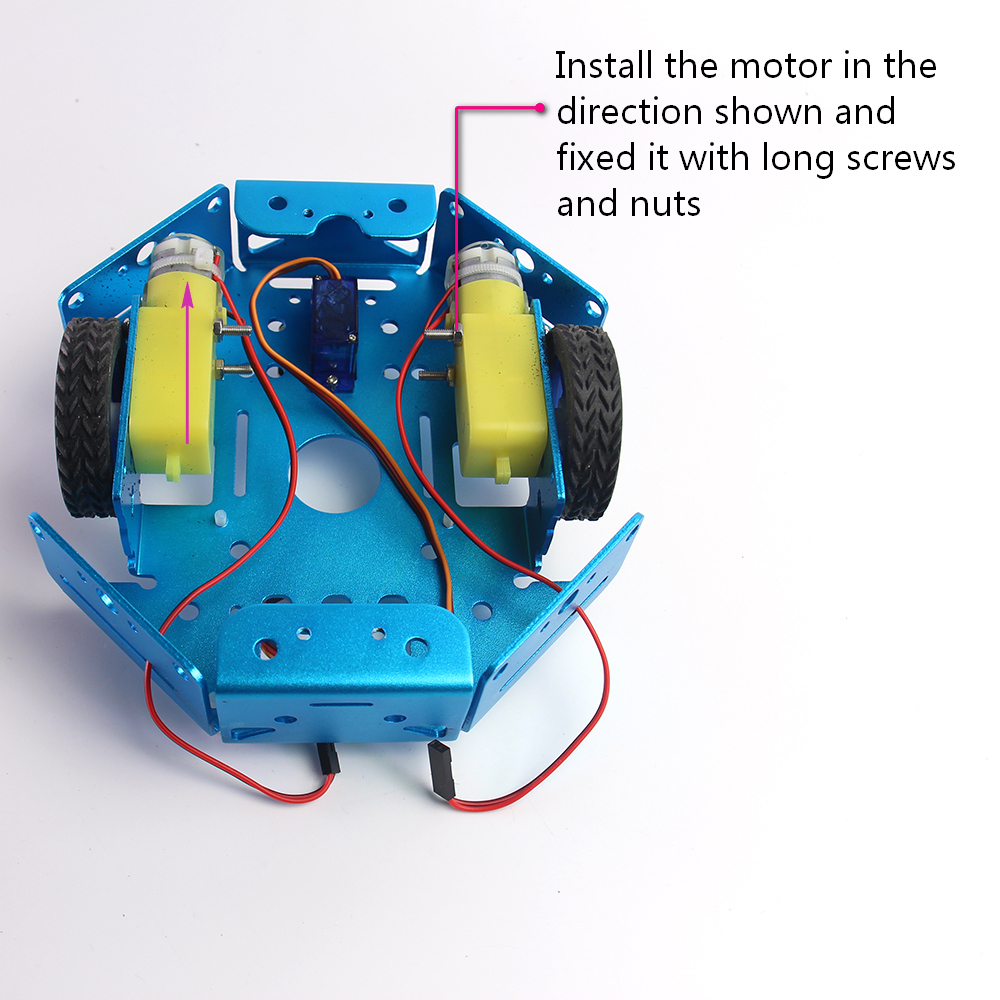
- желтые моторы их еще называют TT Motor
можно использовать моторчики с колесами от твоей старой машинки

- сервомашинка 9г.

- датчики линии,в этом проекте используются аналоговые

- Ультразвуковой датчик расстояния

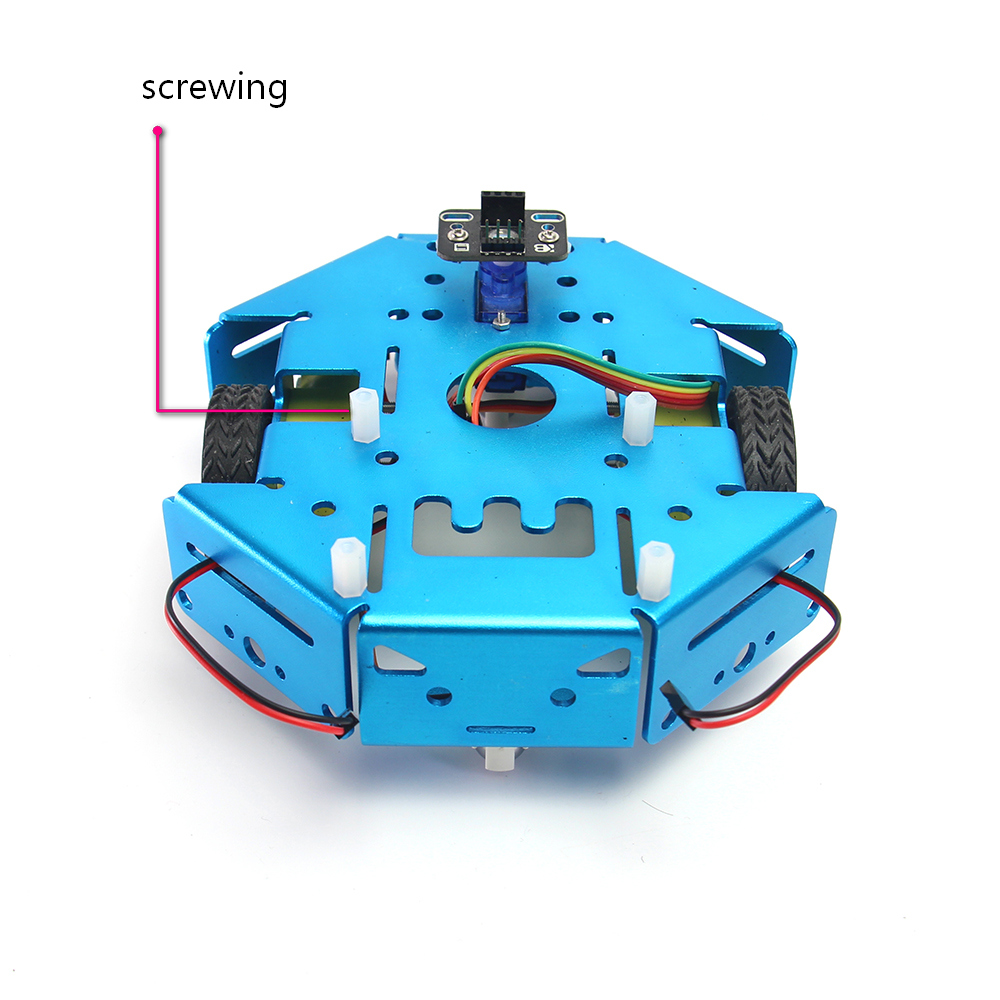
- пластиковые стойки
- винтики и гаечки
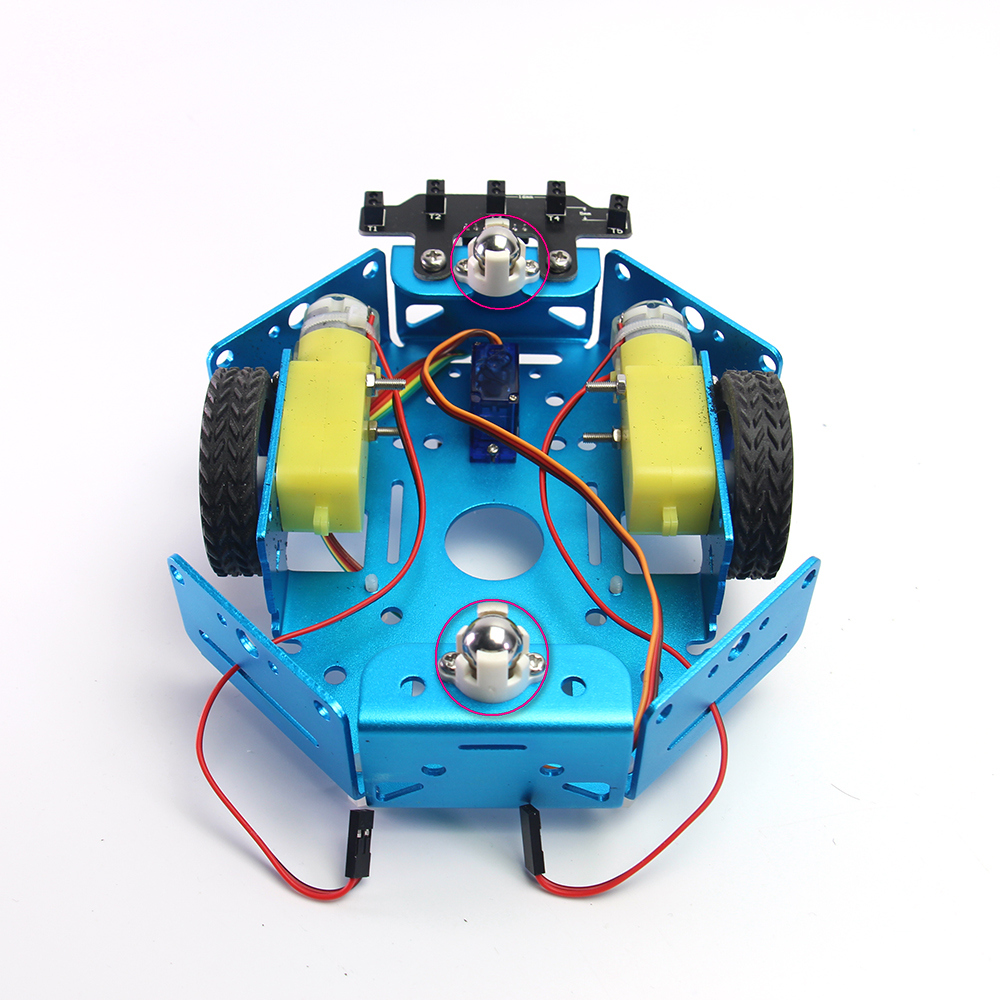
- мебельное поворотное колесико,есть в любом большом строительном супермаркете

- соединительные провода
- инструмент
колесики-ролики установлены на передней и задней частях робота
вы можете изменить конструкцию,принцип для всех роботов-машинок одинаков
!!! моторы можно просто приклеить к платформе с помощью клеевого пистолета!!!
!!! в строительных гипермаркетах много разных шаровых колесиков для твоей машинки)
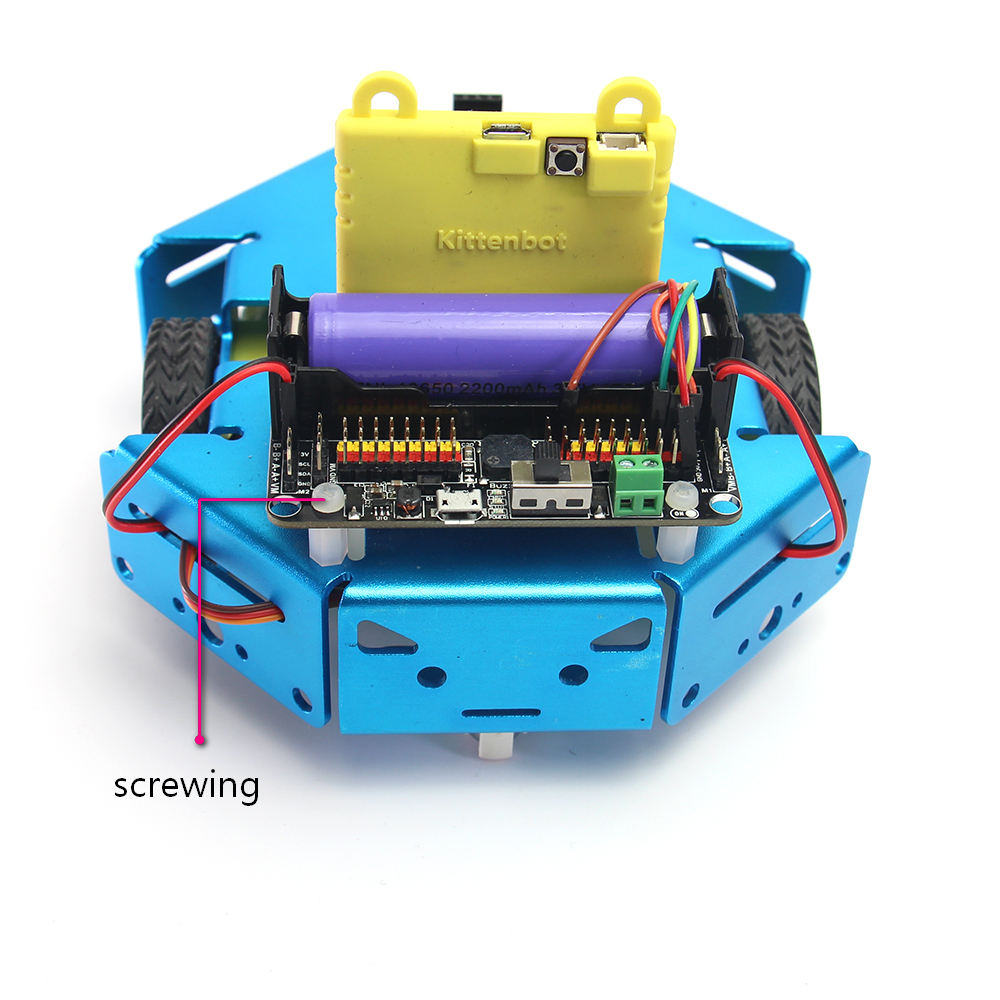
Пластиковые стойки для крепления платы роботбит
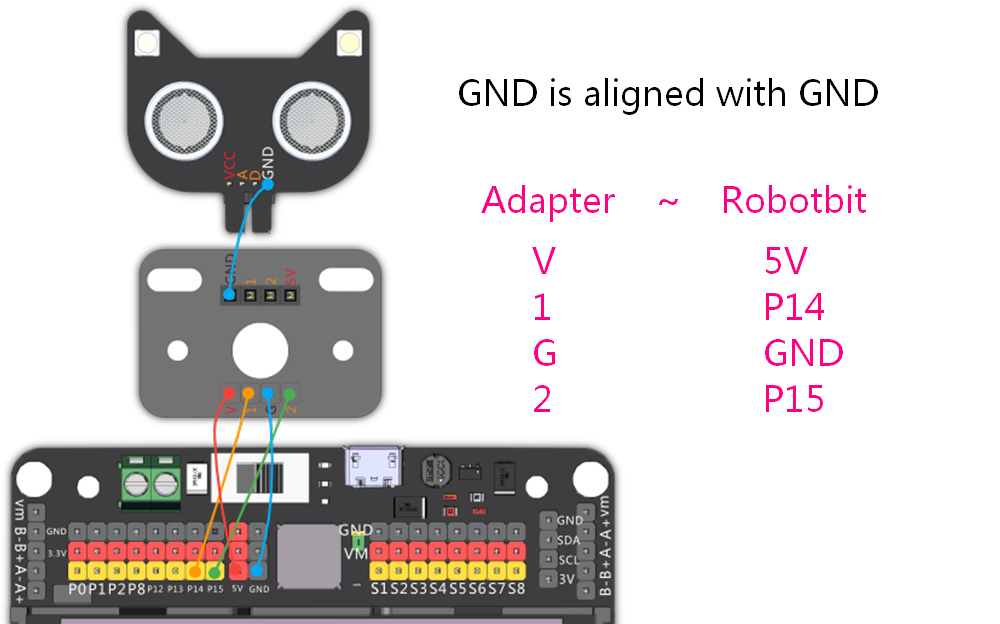
подключение ультразвукового датчика
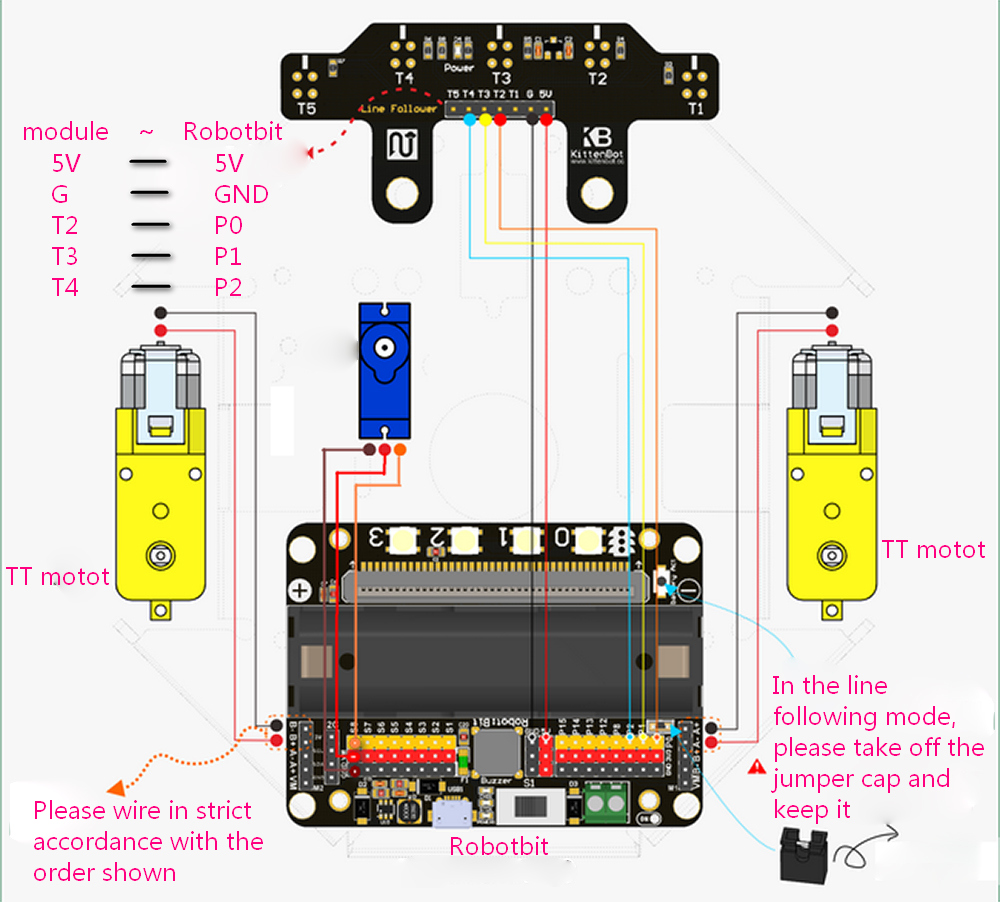
Подключение трех датчиков линии
готовый робот
программирование
Сначала мы должны откалибровать датчики линии, считав исходное значение каждого датчика, реагирующего на черную линию.
загрузите программу тестирования последовательного порта в microbit
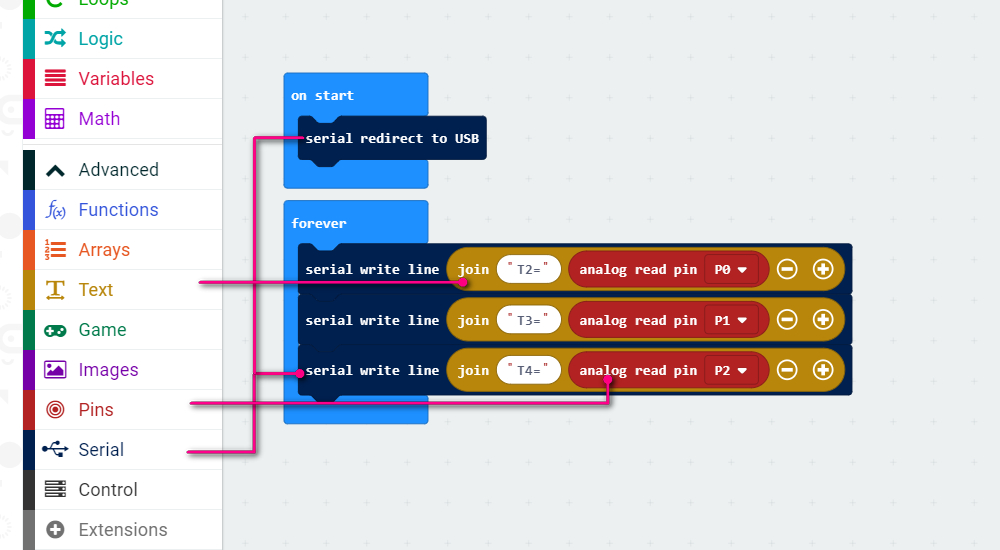
код программы:
https://makecode.microbit.org/_Cz94f2RrqTYf
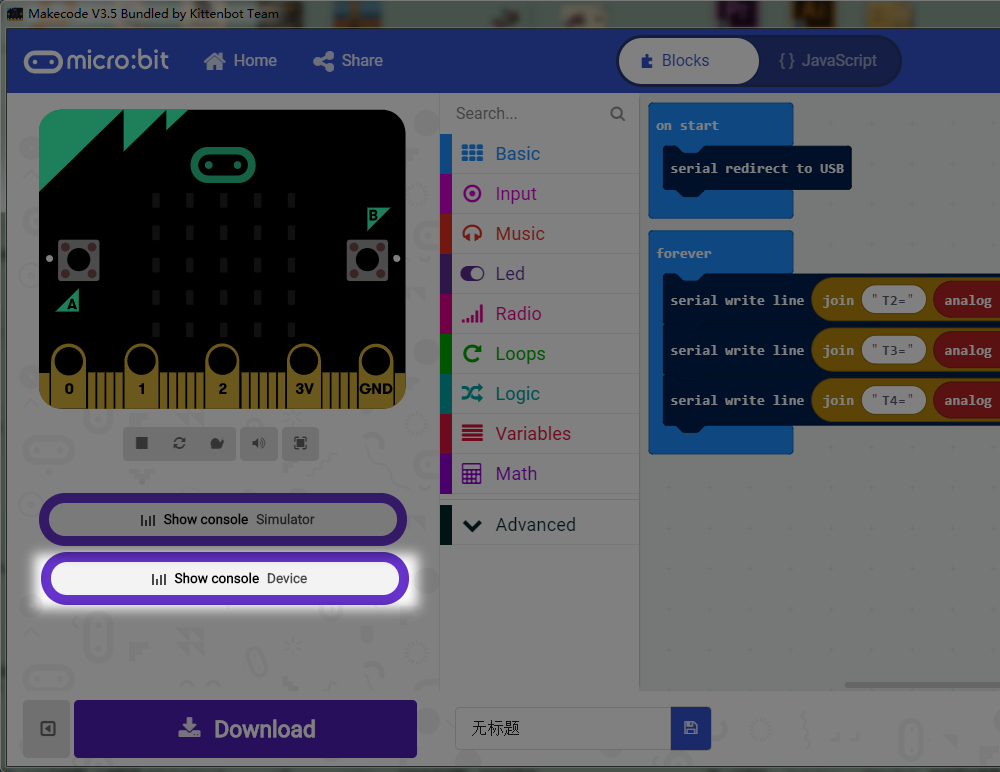
Затем используйте программу makecode и подключите свои датчики линии чтобы наблюдать за их показаниями в программе.
как подключить и настроить последовательный порт здесь

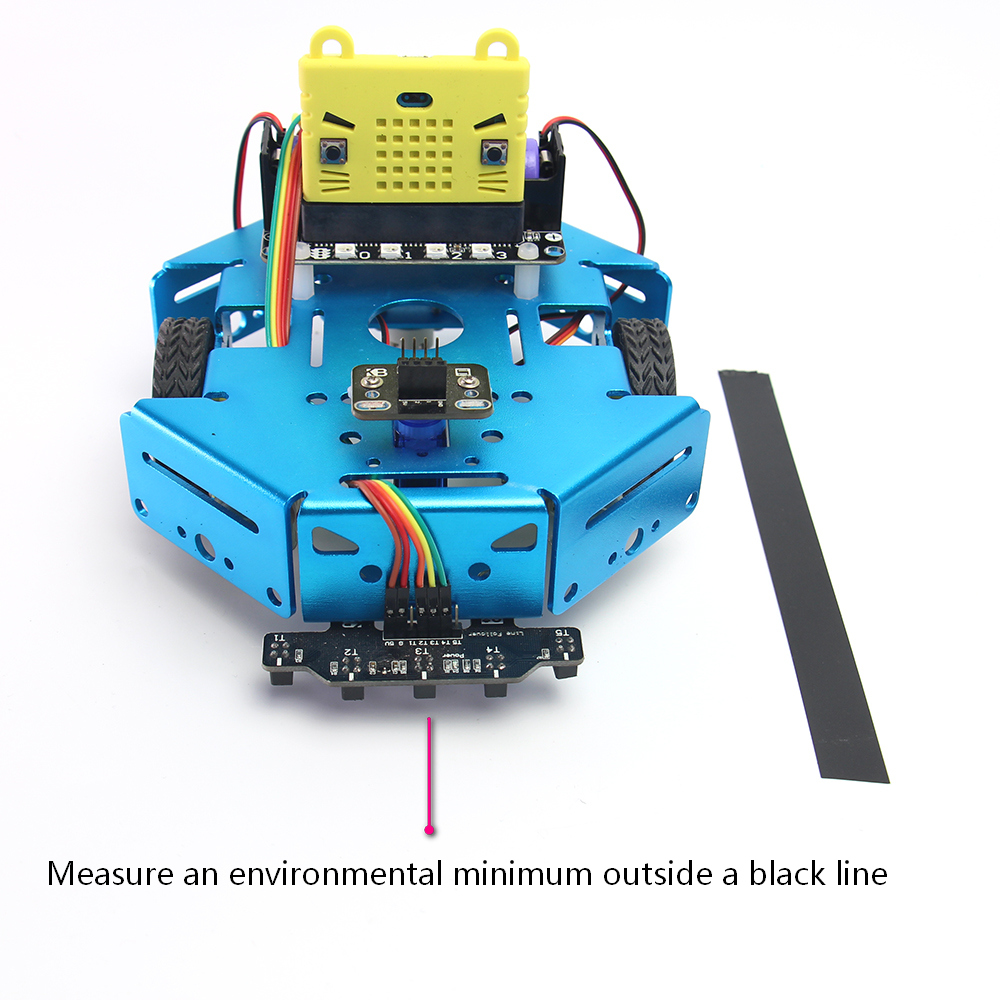
Во-первых, измерьте показание каждого датчика, когда нет черной линии.
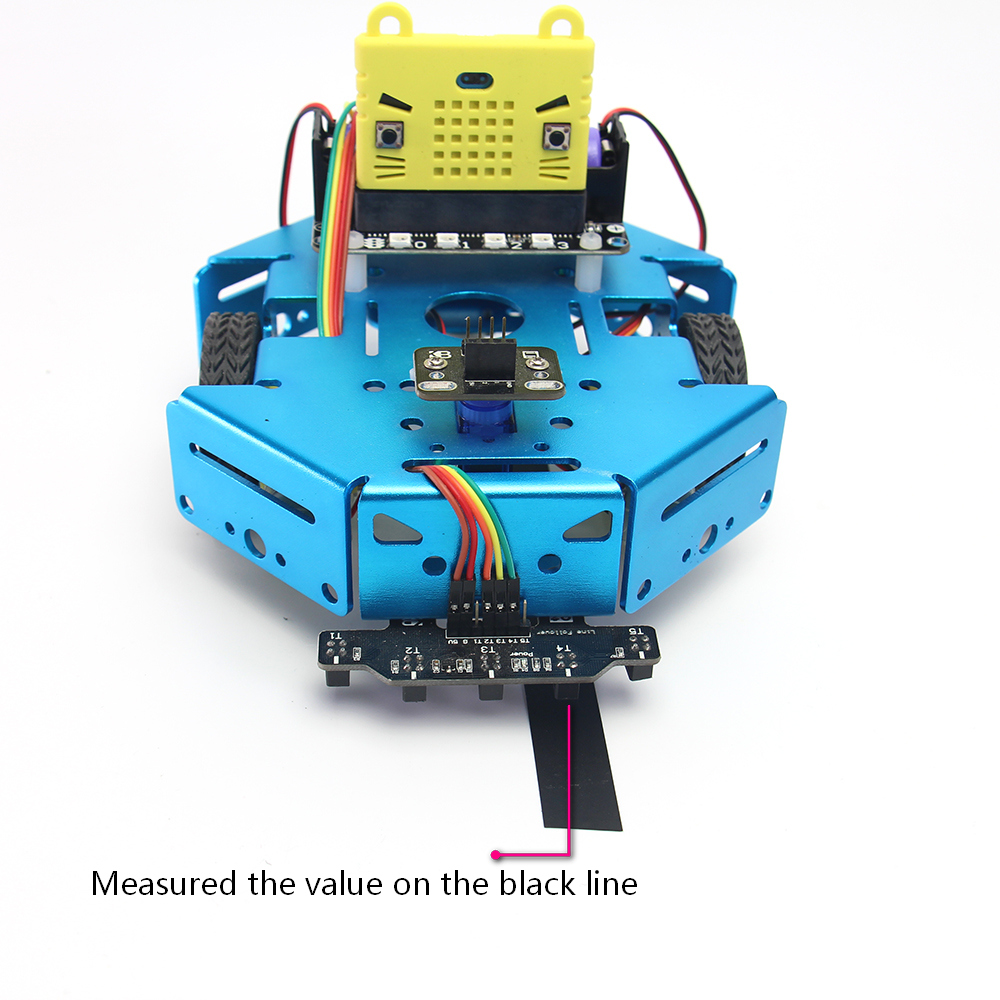
Во-вторых, измерьте значение, когда датчик над черной линией. Запишите все эти значения для каждого датчика, они нам понадобятся на следующих шагах.
- Принцип работы для трех датчиков линии
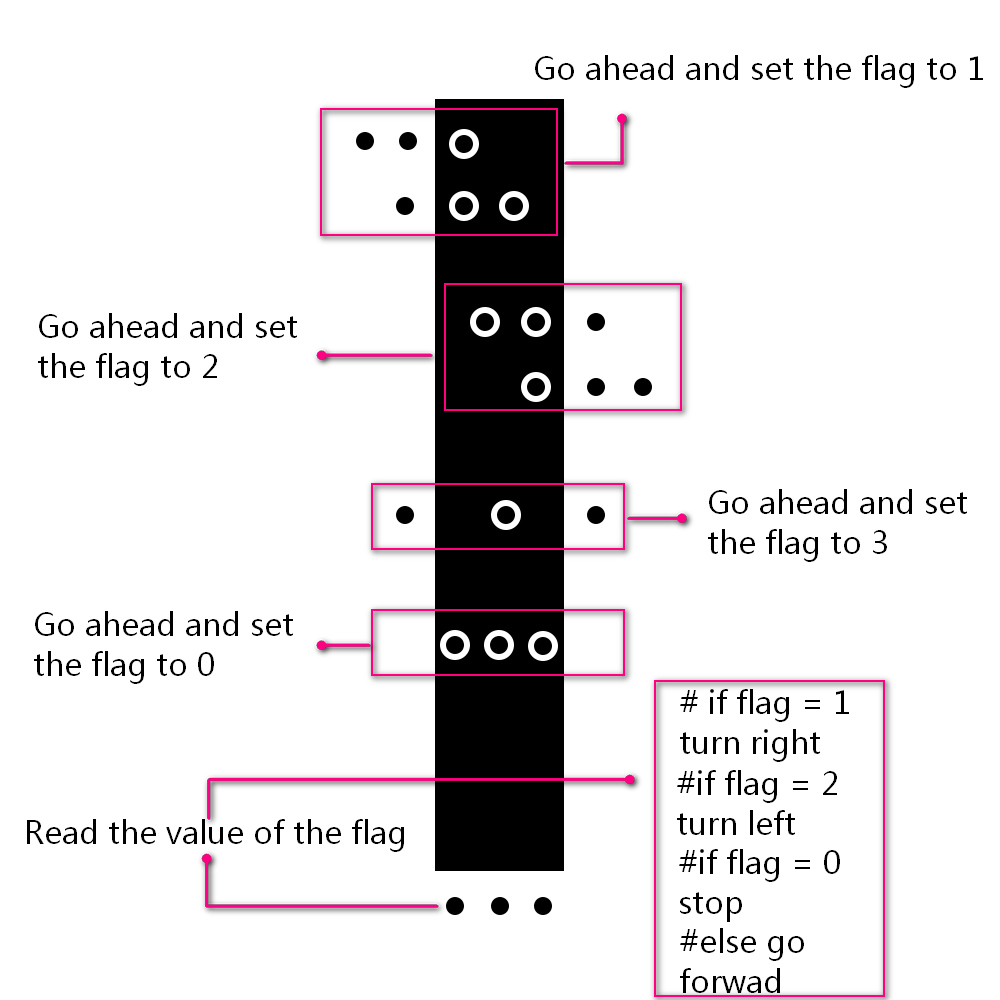
код программы для работы с датчиками линии
https://makecode.microbit.org/_byh2fWUrF3u2

информация про PID регулятор здесь
и здесь
Подключение ультразвукового датчика расстояния с сервомотором
!!! помните эти датчики работают на разное напряжение !!!
примеры работы с сервомотором здесь

- Принцип работы
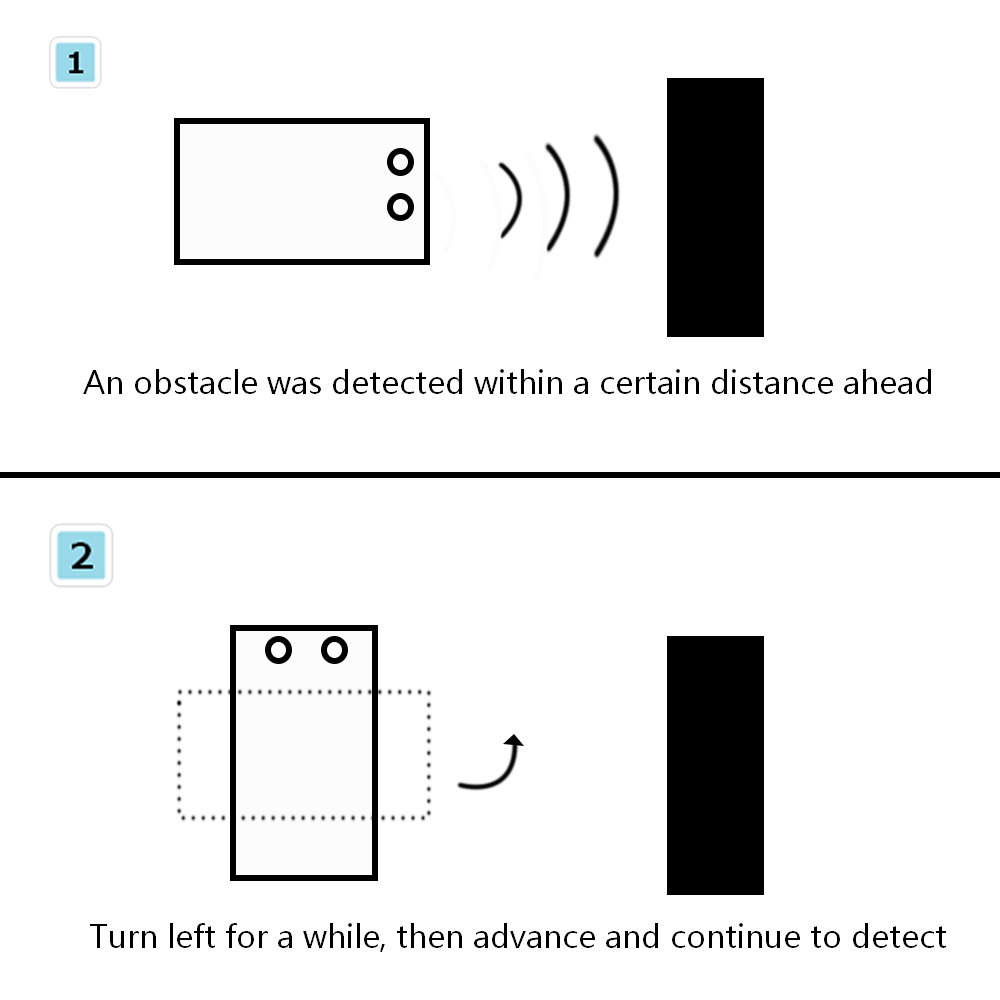
код программы для работы УЗ датчика препятствия с сервомашинкой
https://makecode.microbit.org/_ATF9VPfY0a1L

Примеры работы робота-машинки
Следование по линии
обьезд препятствий при помощи УЗ датчика
Внимание
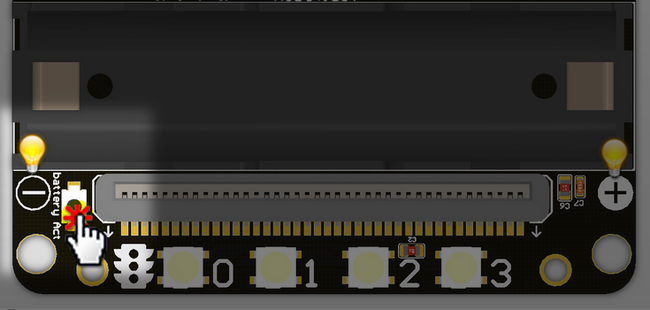
- Каждый раз, когда вы подключаете аккумулятор и включаете выключатель. Первое, что вам нужно сделать, это активировать источник питания.
- Что касается правила подключения двигателя ТТ, красный провод обозначает положительный знак, а черный провод - отрицательный. Таким образом, положительное число в программе может управлять вращением двигателя по часовой стрелке.
Если вы обнаружили, что двигатель вращается вопреки ожиданиям, просто переверните провода ( поменяйте местами).
- Контакт P0 используется в функции следования по линии , поскольку контакт P0 изначально совмещен с зуммером, необходимо снять перемычку.
