программирование сервомотора
igorкупить можно здесь
Под сервоприводом понимают механизм с электромотором, который можно попросить повернуться в заданный угол и удерживать это положение.
основным достоинством этого сервомотора является совместимость с LEGO деталями
можно создавать проекты используя лего

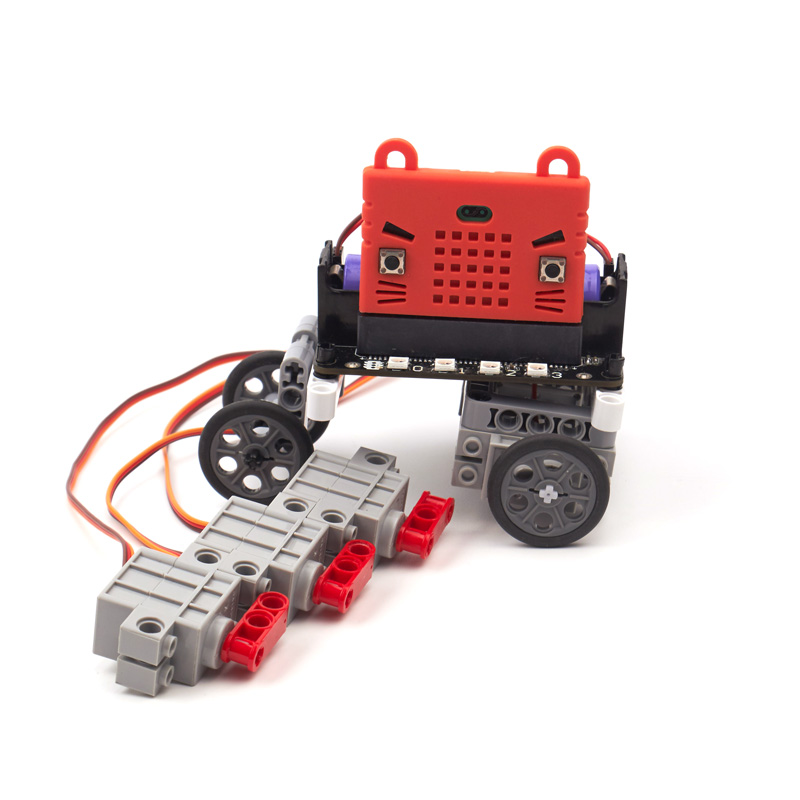
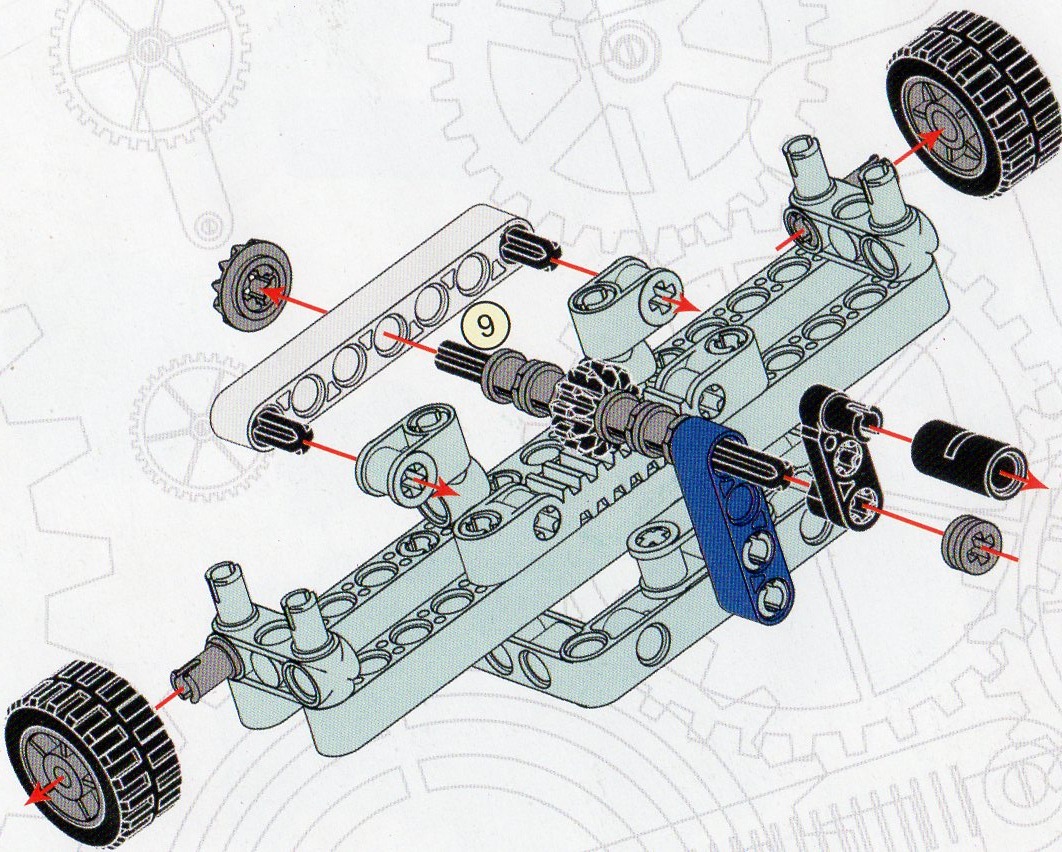
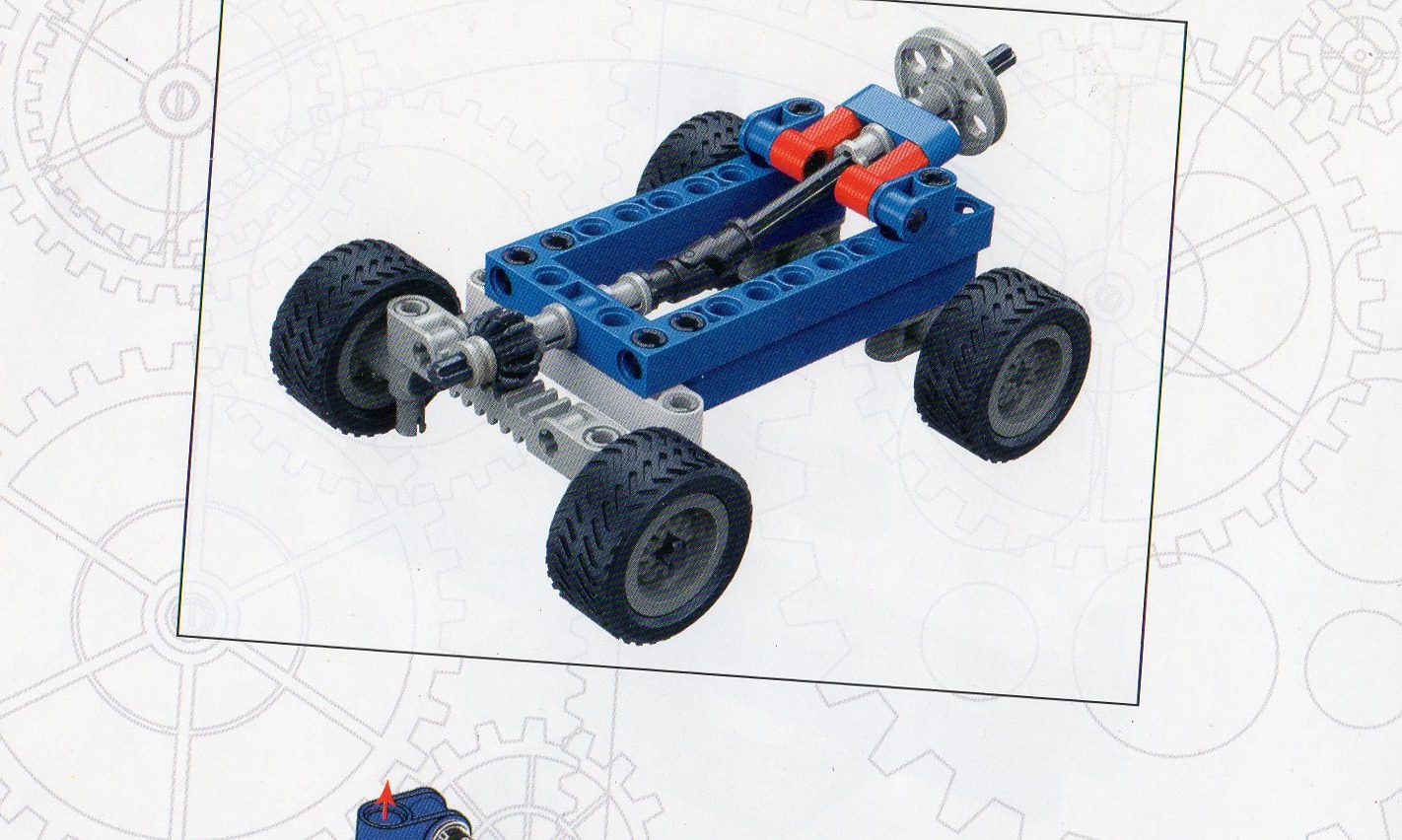
серво можно использовать как управляющий механизм в рулевой рейке легоавтомобиля или в различных манипуляторах и других механизмах


Серый это сервомотор !!!
Серводвигатель Технические характеристики
- Рабочее напряжение: 3,3 В ~ 6 В
- Номинальное напряжение: 4.8 В
- Номинальный ток: 200 мА
- Максимальный крутящий момент: 500г.см
- Угловая скорость: 60 ° / 0,12 с
- Вес нетто: 12,8 г
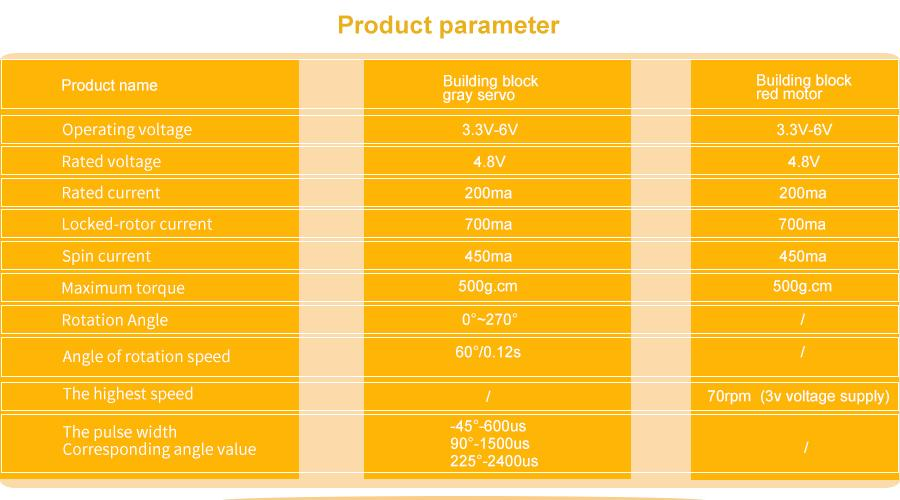
В то же время, этот сервопривод Lego имеет 270 ° поворота(используемый в нем потенциометр - 300 °), а обычный синий маленький сервопривод(самый популярный на рынке) - 0 ~ 180 ° . Поскольку угол поворота больше, чем у синего сервопривода 9g , управляющий импульс немного изменяется. Тем не менее, в самом Arduino можно инициализировать его , чтобы установить диапазон ширины импульса.
Рулевой механизм LEGO использует обычное управление шириной импульса и не включает протокол управления. Аналогично обычному способу управления маленькой синей серво, ширина импульса на 90 ° составляет 1500 (то же, что и для стандартного синего серво)
Методы управления в различном программном обеспечении показаны в этой статье.

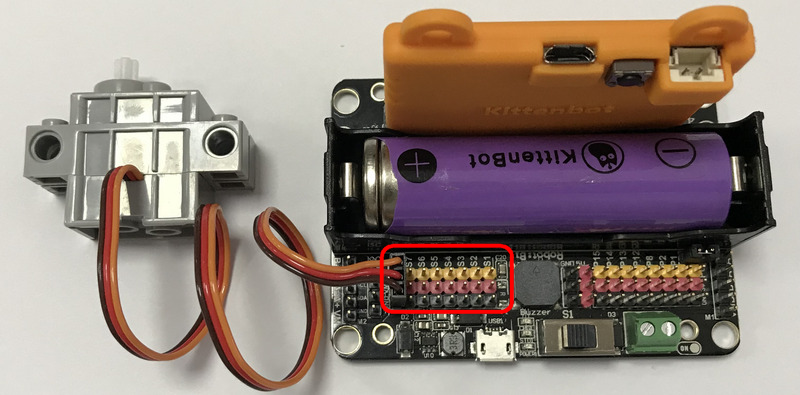
Сервомотор имеет стандартный 3 pin коннектор для подключения к различным ардуино подобным платам

как обычно , красный плюс,черный минус,желтый - сигнал
Рассмотрим возможность управления сервомотором с помощью программы MakeCode для микробит и платы расширения РоботБит
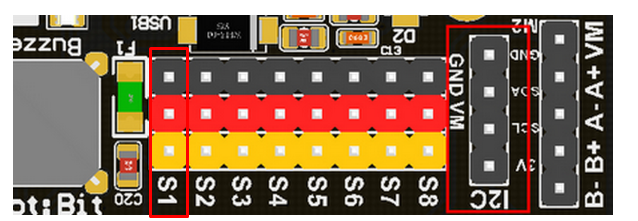
Для платы Robotbit сервомотор может быть подключен на интерфейс с S1-S8.
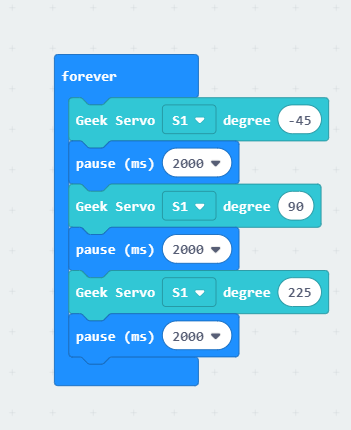
Напишем простую программу
Откройте программу Makecode и добавьте расширение для платы Роботбит
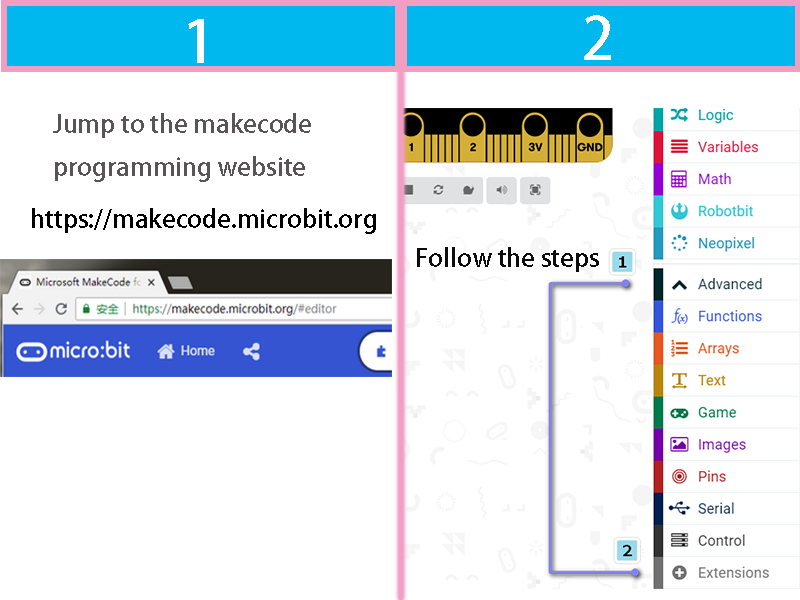
Введите в поиске слово robotbit
Кликните по появивишемуся расширению и оно автоматически добавится на рабочую область

Специальный раздел с блоками для платы РоботБит появился в окне редактора

Потренируйтесь добавлять блоки на рабочую область, в настройках блоков ставьте нужные порты ввода-вывода к которым подключены сервоприводы, моторы и т.д.
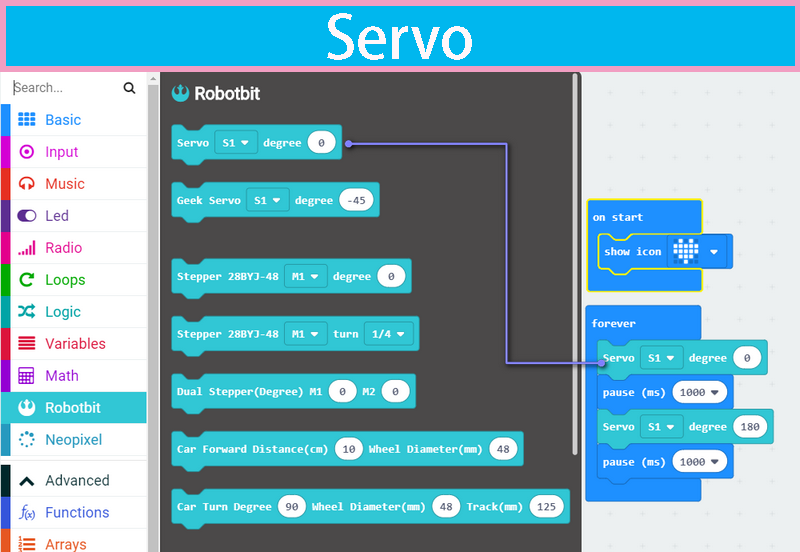
напишем простую программу
Перед загрузкой вашей готовой программы, запомните,надо подключить плату micro:bit к компьютеру (именно плату micro:bit, а не плату РоботБит, т.к. usb-разъем на плате РоботБит только для зарядки аккумулятора). Плата micro:bit может оставаться подлюченной к плате РоботБит в это время.
Нажмите кнопку Download
После нажатия на данную кнопку, появится окно, где будет предложено, куда сохрнаить файл, сохраните файл на хранилище MICROBIT, которое появится как съемный диск, когда плата подключена к компьютеру.

подключите сервомотор к плате на контакты S1
включите плату Роботбит,и если вы все сделали правильно сервомотор начнет выполнять программу