План обучения программированию
"Робот и Я"В нашем клубе занимаются ребята разных возрастов. Почти все ученики начинают знакомство с робототехникой с изучения курса конструирования. Следующий этап развития - изучение языка С++ и создания роботов с использованием различных контроллеров, комбинаций датчиков и самых разных приводов .

Сложность проектов повышается вместе с расширением кругозора учеников. В течение года темы варьируются в соответствии с интересами и увлечениями учеников, часто вписывая их собственные проекты в общий тематический план.
Цели на год
- 1 год. Основы С++, Arduino и схемотехники.
- 2 год. Разработка роботов для участия в соревнованиях. IoT и умный дом
- 3 год. Основы python для разработки приложений и управления роботами.
- 4 год. антропоморфные шагающие роботы
- 5 год. роботы-собаки
- Моделирование и 3д печать
- Ключевые требования к поступающим на курс
1 год
В начале курса программирования основной упор идëт на знакомство с компьютером, электроникой и электронными схемами, расчетами и физическими законами, и самое главное - с программированием контроллеров (на примере Ардуино).
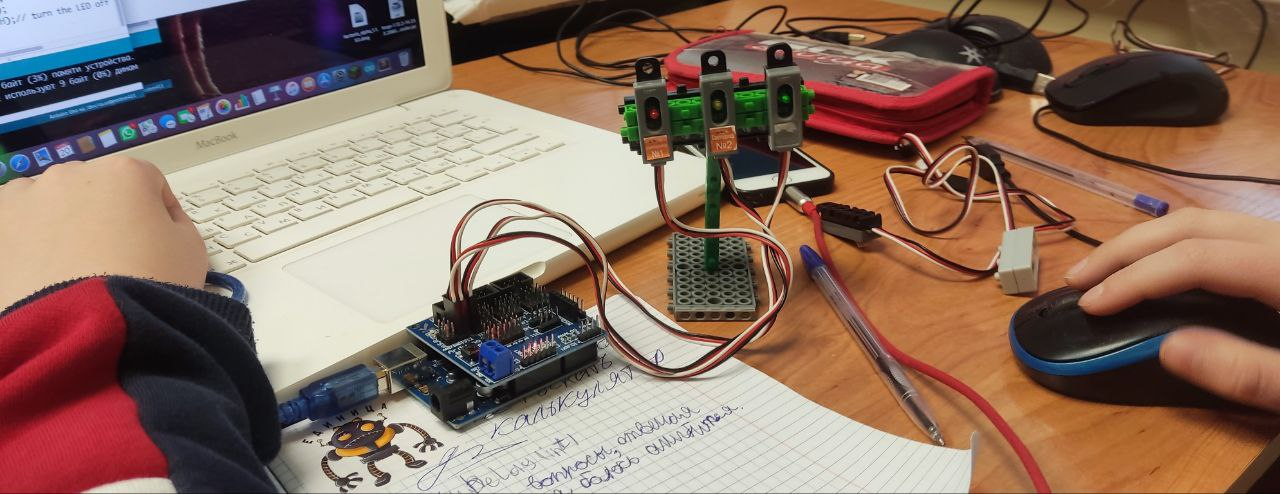
На занятиях ребята, часто не знакомые с компьютером, учатся использовать его в профессиональных целях: устанавливают и настраивают программы, правильно подключают и настраивают устройства, создают схемы в fritzing, разрабатывают прошивки контроллеров. Практические навыки работы руками формируются при сборке электронных схем и устройств на макетной плате, проведения расчетов компонентов и небольших соревнований. Знакомство с физическими законами проходит через их переоткрытие в процессе экспериментов.
Тематический план:
- работа с компьютером, контроллером, техника безопасности и правила поведения.
- особенности контроллера, первая программа
- синтаксис языка С++. Операторы и типы данных
- основы работы с макетной платой
- проведение расчетов разветвленных цепей
- простейшие логические схемы
- сравнение ручного управления электроникой и программная автоматизация
- принципы связи контроллера с внешним миром
- взаимодействие с контроллером и отладка программы и устройства
- работа с цифровыми и аналоговыми датчиками различных типов
- сервоприводы и моторы
- подходы к организации хранения и обработки данных данных
Знания и навыки, полученные в первый год, становятся фундаментом для дальнейшей учебы в клубе и в школе. Они помогают лучше понимать принципы работы с различными датчиками при создании роботов.
2 год
Упор идет на разработку мобильных роботов для участия в различных конкурсах и соревнованиях. .
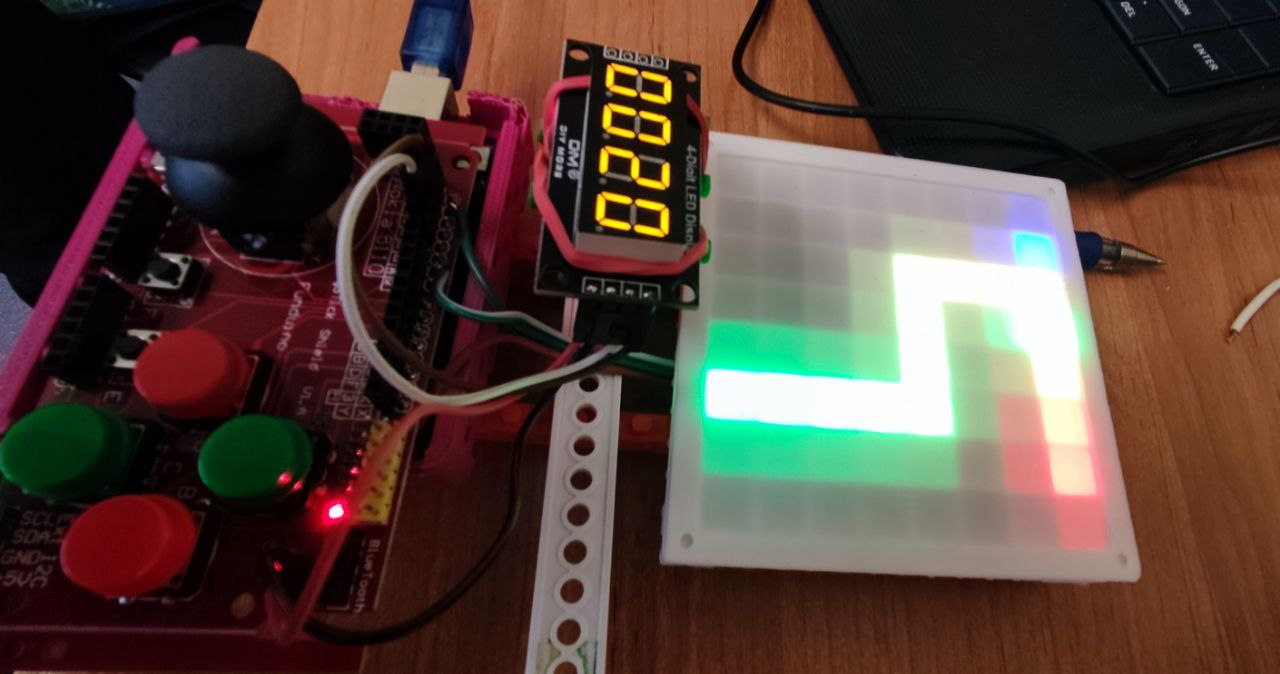
Применяются различные библиотеки, упрощающие работу со сложными задачами. Новые интерфейсные датчики еще больше расширяют возможности разрабатываемых устройств. С использованием контроллеров семейства ESP появляется возможность взаимодействия нескольких устройств через интернет, а значит становится возможным создавать компоненты умного дома
Тематический план:
- построение платформы для езды по линии
- управление приводами. обратная связь от датчиков. регуляторы
- простейшие роботы шагоходы
- работа с датчиками для определения расстояний. Роболабиринт
- основные интерфейсы (i2c, spi, uart)
- протоколы передачи данных
- работа с платформами ESP01, ESP8266, ESP32
- построение телеграм-бота
- разработка элементов умного дома
- взаимодействие с роботами через интернет
По итогам второго года у ребят появляется мотивация создавать проекты самостоятельно, как для дома, так и для участия в различных школьных конкурсах.
3 год
Максимально повышаем уровень автономных роботов.
Работаем с IDLE, Anaconda и PyCharm. Это наиболее распространенные среды разработки, позволяющие быстро и без больших трудностей решать наши задачи
Начинаем знакомство с разработкой приложений на ПК для взаимодействия с роботами и умным домом.Для этого знакомимся с особенностями языка Python. При этом теория языка сразу подкрепляется практическим применением при разботке приложений с скриптов.
Тематический план:
- установка программного обеспечения и настройка среды программирования
- основы Python
- библиотека tkinter для разработки простейших интерфейсов
- взаимодействие ПК с роботом
- первые шаги с графикой в openCV
- не сложный графический интерфейс управления роботом и умным домом
В ходе 3 года ребята привыкают использовать оптимальные программные инструменты для разработки нижнего уровня - контроллера, и верхнеуровневых приложений для ПК. В ходе каждого проекта код пишется на С++ и Python, позволяя наглядно различать синтаксис языков и сравнивать конструкции операторов.
Новые знания применяются на уже известных роботах и закрепляют уже известный материал
4 год
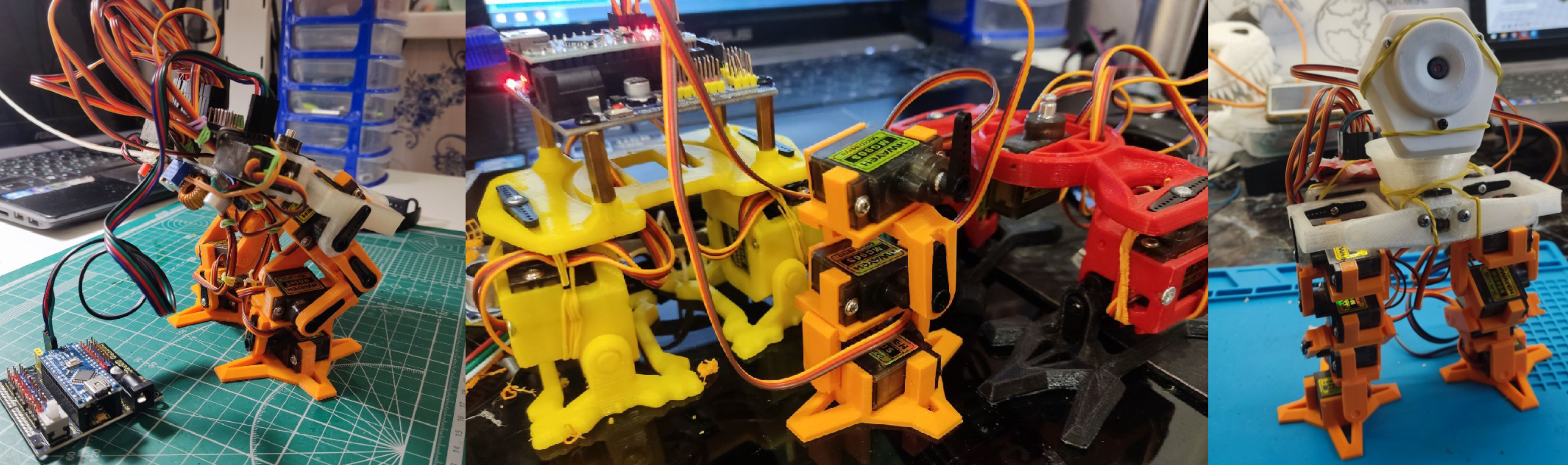
Изучаем математическое моделирование и подходы к решению обратной задачи кинематики для реализации движения шагающих роботов с большим количеством степеней свободы
Тематический план:
- прямая и обратная задача кинематики
- математическое моделирование динамики перемещения звеньев
- разработка системы согласованного управления несколькими конечностями
- разработка программного обеспечения для управления двуногим роботом
Эта часть курса активно использует наработки из курса по 3д моделированию. Все детали роботов распечатаны на принтерах и часто заменяются на более удачные. Некоторые ребята приносят свои версии и работают сразу со своими личными и уникальными роботами
5 год
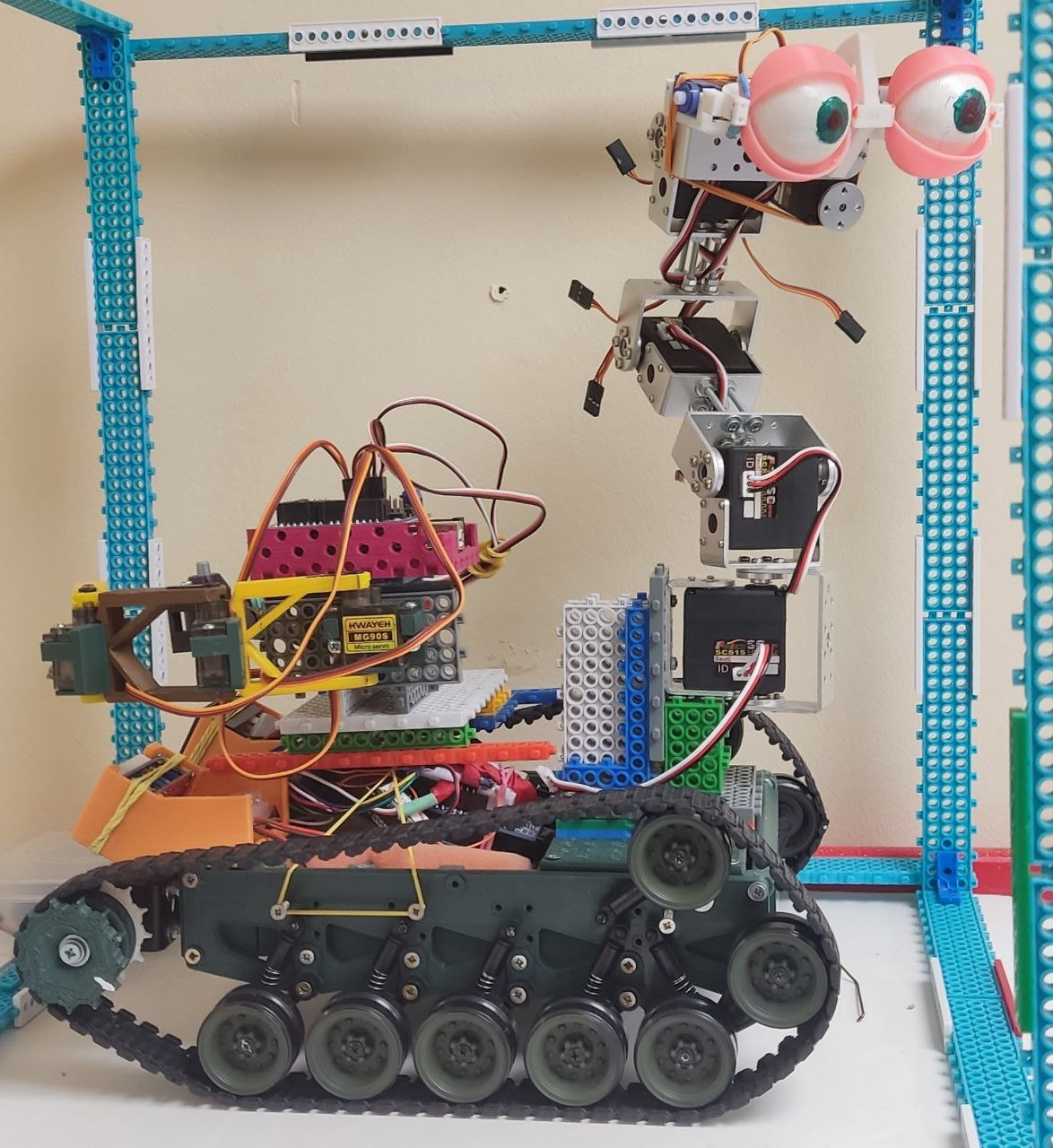
Расширяем сложность проектов до четвероногих роботов со сложной системой датчиков.
Все знания накопленные за прошедшие годы должны в полной мере раскрываться при разработке управления роботом собакой
Тематический план:
- Обратная задача кинематики
- Микромеханические датчики положения
- Робот балансир
- Динамическое равновесие собаки
Самая амбициозная задача за все годы. Самая большая сложность ученикам находить время для разработки решений, ведь экзамены всё ближе. Особенно радует, что ребята, дошедшие до конца, точно знают с каким ВУЗом и специальностью связать свою жизнь.
Моделирование и 3д печать
Этот курс посвящен моделированию деталей и механизмов в распространенных конструкторских программных пакетах. Ребята учатся выполнять чертежи, строить объёмные фигуры, делать сборки механизмов и анимацию движущихся частей
Разработанные модели изготавливаются 3д принтерах.
Навыки помогают ребятам воплощать в реальность образы роботов и полезных устройств.
Тематический план:
- установка и настройка конструкторских программ для моделирования
- работа с измерительным инструментом
- построение простейших моделей и их изготовление на 3д принтере
- оптимизация разработки сложных моделей с применением всех возможностей программных пакетов
- создание корпусов для контроллеров, датчиков и роботов
- особенности работы с 3д принтерами разной кинематики

По результатам наших занятий ребята получают знания для разработки своих деталей, в том числе и для деталей конструктора HUNA, что бы иметь возможность собрать самого необычного робота для самых сложных соревнований
Ключевые требования к поступающим на курс
Обязательные требования:
- Любовь к роботам и робототехнике
- Интерес к технике, электронике
- Желание творить и создавать
- Любознательность
- Готовность решать сложные задачи
- Потребность в получении новых знаний
- Обязательно выполнение домашних заданий! Без этого ребята начнут быстро отставать от лидеров своих групп.
Желательно иметь:
- Arduino UNO или Nano для проверки домашних заданий
- Доступ к домашнему компьютеру для проведения собственных экспериментов
- При наличии персонального ноутбука ребятам будет намного проще работать с материалом с занятий и разрабатывать собственные проекты
В помощь ребятам есть отличный минисправочник от АлексаГайвера, который можно скачать. Очень рекомендую знакомиться со всеми доступными в интернете ресурсами на тему программирования и робототехники, это здорово раздвигает границы воображения