Приводы
"Робот и я"Приведем принцип работы и классификацию двигателей
Электро двигатели
наиболее распространенные в современной робототехники, в силу малых размеров и простоты управления ими. В реальных проектах применяются различные приводы:
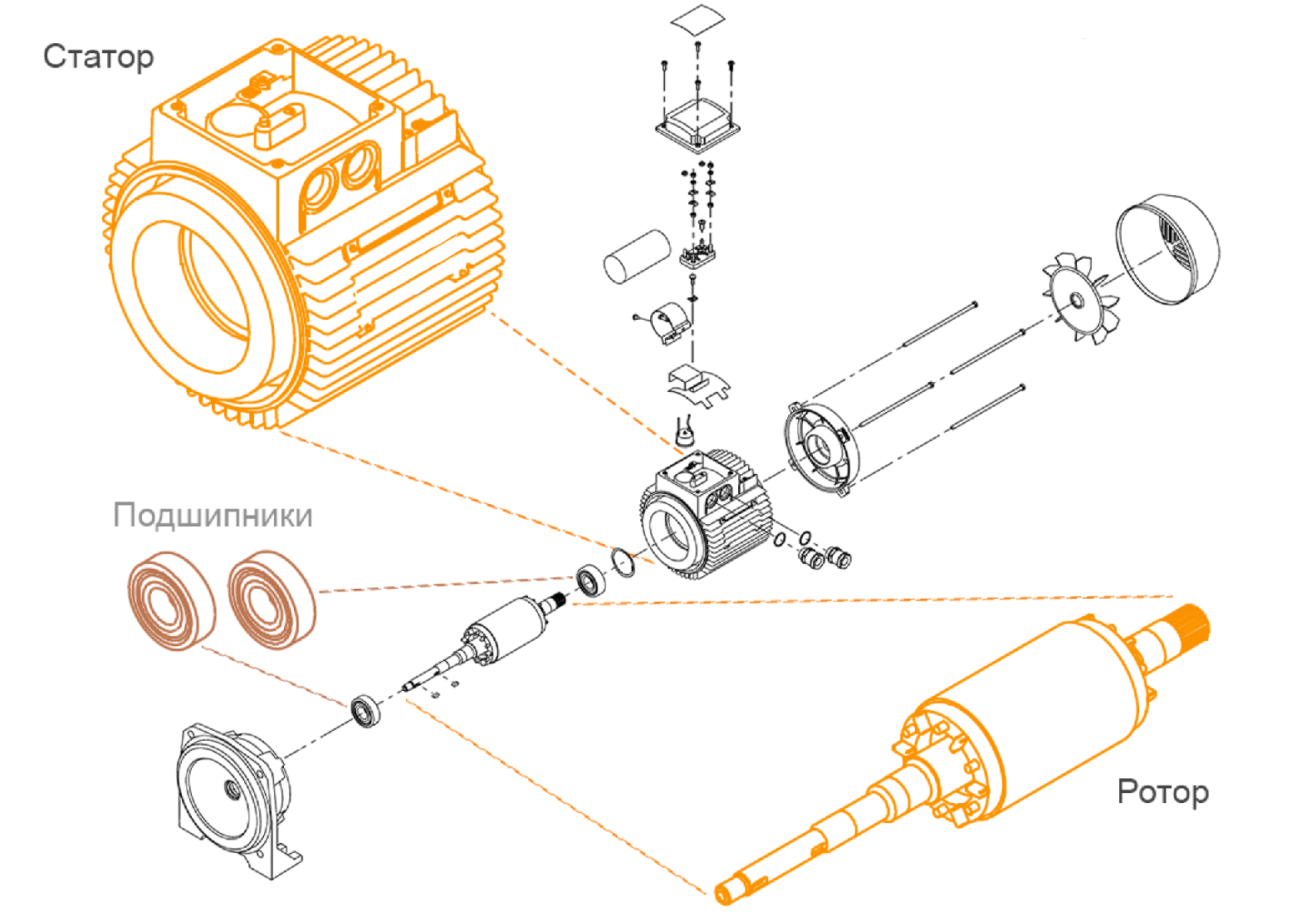
В общем виде электродвигатель состоит из старора и ротора. Остальные компоненты нужны для управления им и повышения эффективности работы.
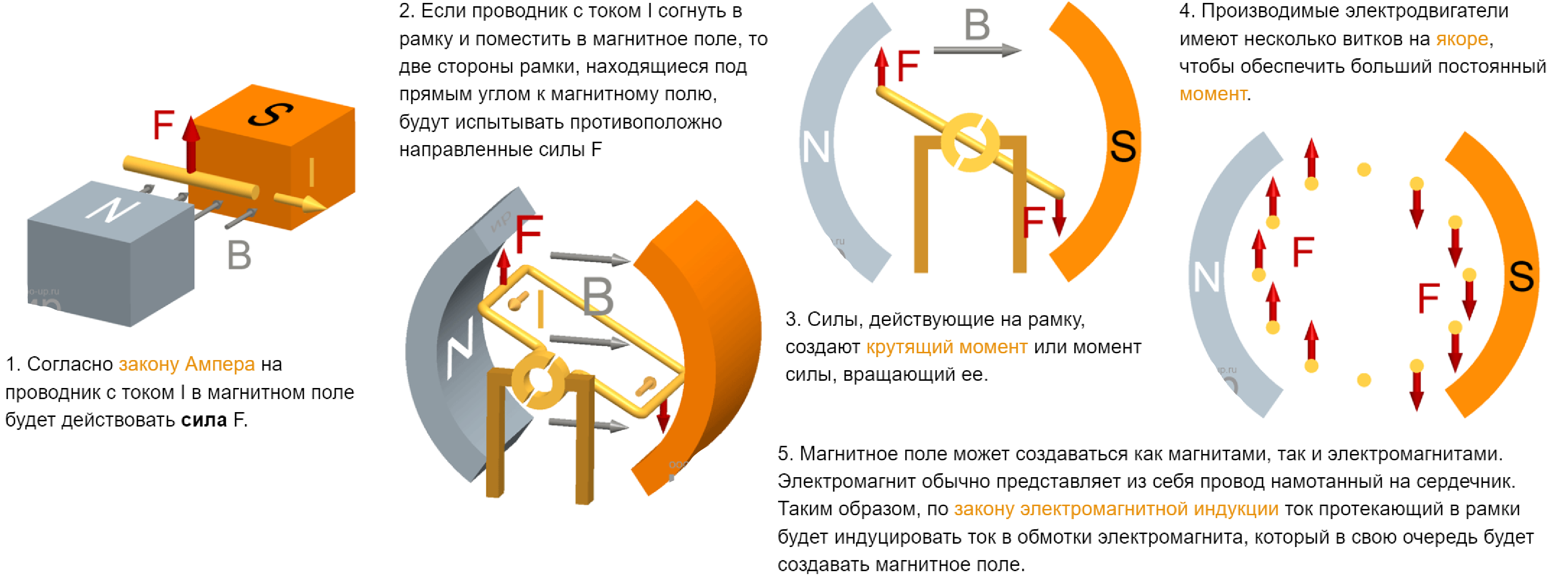
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) - векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.

- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор или плече силы, м (реже см)
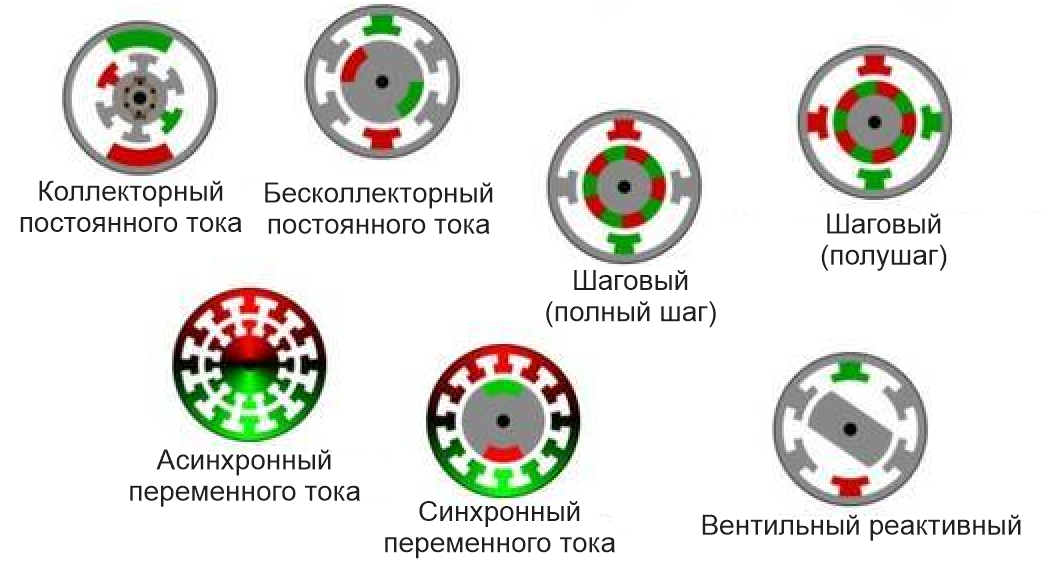
Двигатели применяемые в наших робототехнических проектах разделим на группы:
- Двигатели постоянного тока. Теория. Ссылки на товары
- Сервоприводы. Теория. Ссылки на товары
- Шаговые двигатели. Теория. Ссылки на товары
- Бесколлекторные моторы. Теория. Ссылки на товары
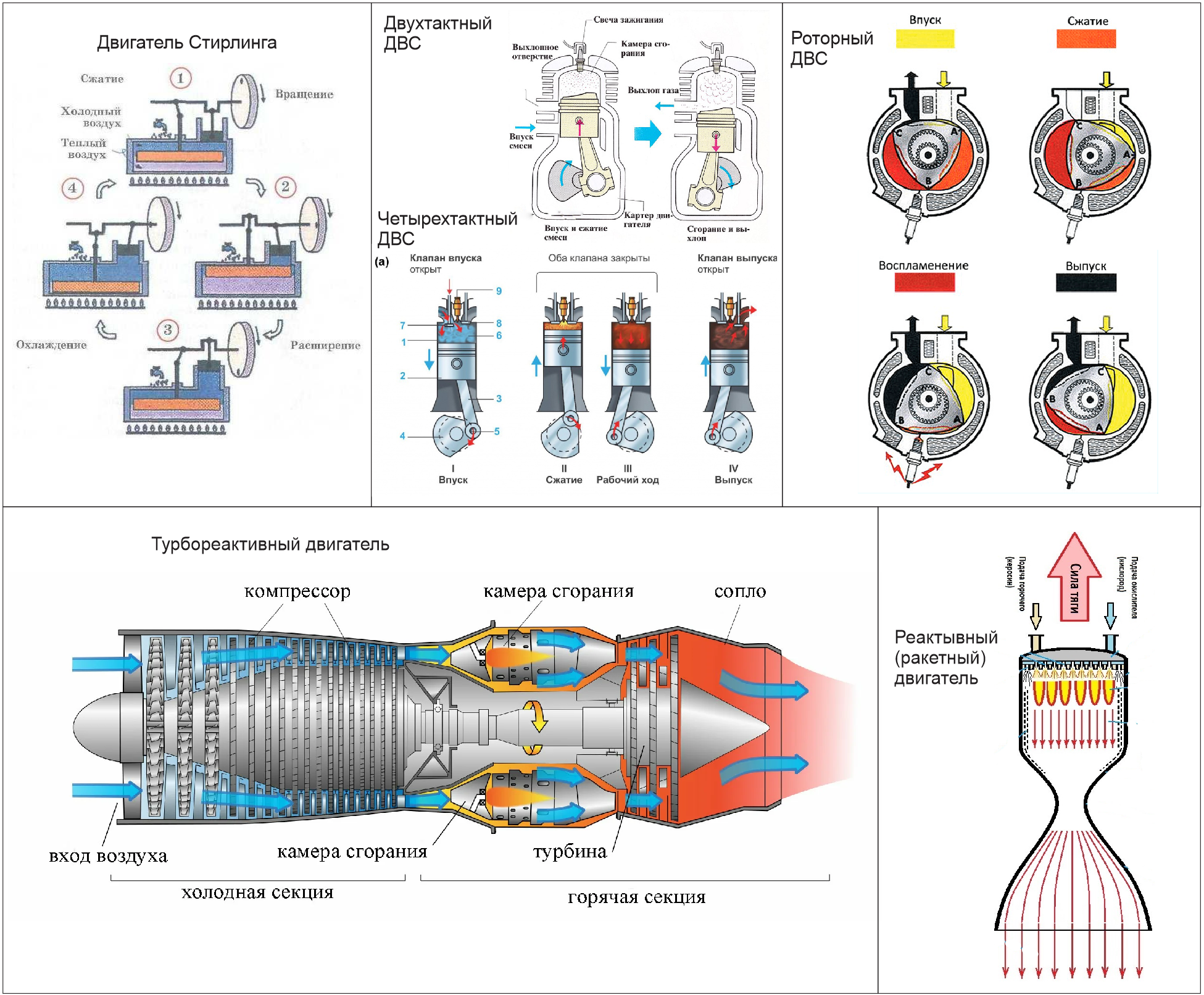
Тепловые двигатели
Двигатели, в которых энергия сгорания топлива переходит в механическую энергию. Выделим 5 основныхъ классов двигателей:
- Двигатели внешнего сгорания (Стирлинга). Теория. Ссылки.
- Двигатели внутреннего сгорания поршневые (Двухтактные и четырехтактные). Теория. Ссылки.
- Роторные двигатели. Теория. Ссылки.
- Турбореактивные. Теория. Ссылки.
- Реактивные (твердотопливные и жидкостные). Теория. Ссылки.
Все эти двигатели находят применение в различных образовательных и хобби проектах.