Энкодер
Sanford Leffler
Частенько помимо контроля частоты вращения электродвигателя нам нужно знать ещё и количество вращений, совершённое его ротором. Контролировать это можно несколькими путями, один из которых - банальная установка концевого переключателя через редуктор, как это можно встретить на грузовых кранах.
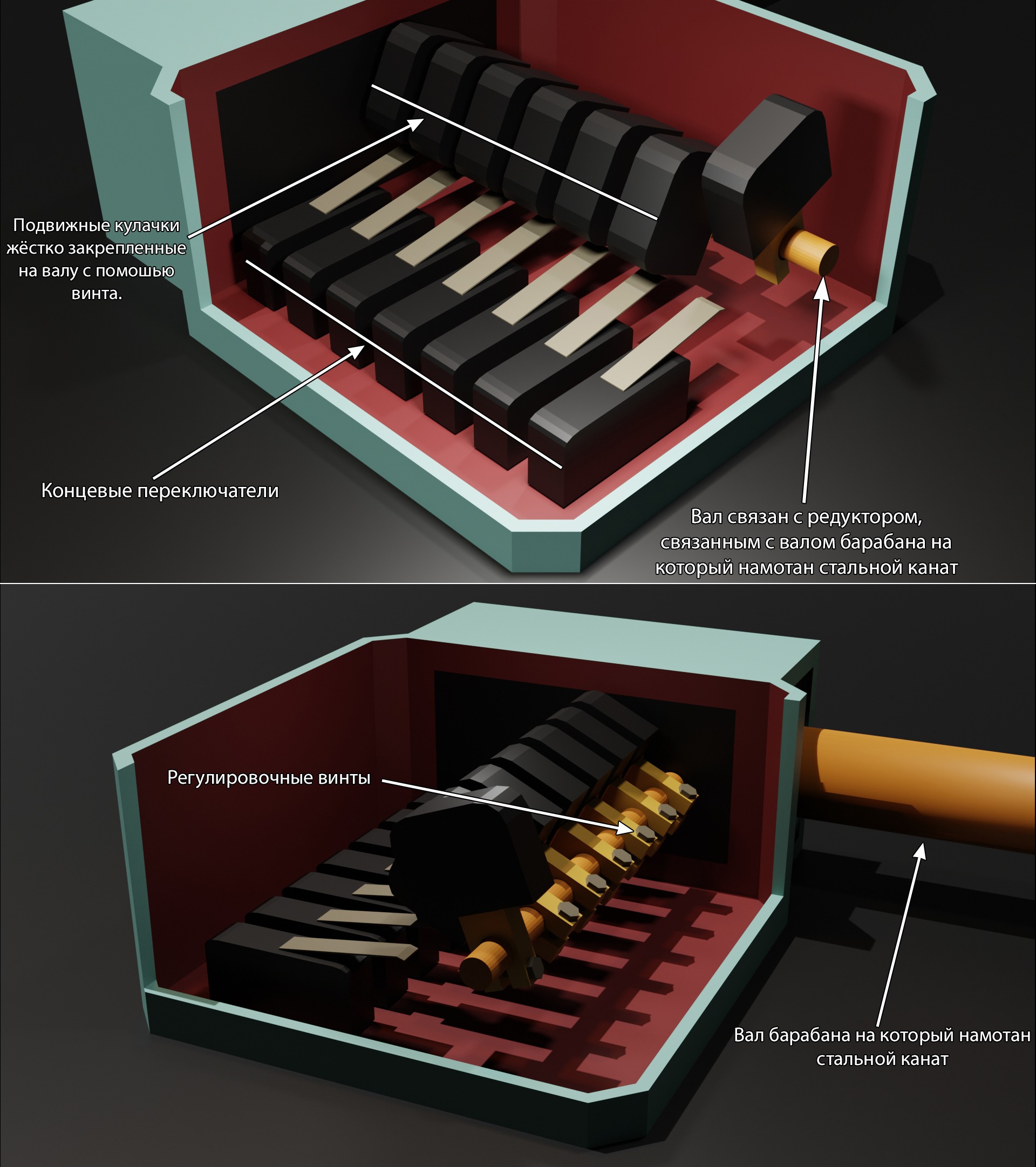
Там это выступает в роли защиты от полного разматывания барабана со стальным тросом. Тут большая точность ни к чему. Однако когда дело доходит до точности повыше - нужно более сложное устройство.
Энкодер – это устройство, преобразующее линейное или угловое перемещение в последовательность сигналов, позволяющих определить величину перемещения. Энкодер представляет собой устройство, вал которого соединяется с вращающимся валом исследуемого объекта, и обеспечивает электронный контроль угла поворота последнего.
Энкодеры бывают двух типов:
– Инкрементный (накапливающий) – энкодер выдаёт импульсы, означающие изменение его положения;
Что это значит? На выходе они формируют импульсы, по которым принимающее устройство определяет текущее положение вала путём подсчёта числа импульсов счётчиком. Сразу же после включения накапливающего энкодера положение вала неизвестно. Для привязки системы отсчёта к началу отсчёта инкрементные датчики имеют нулевые (референтные) метки, через которые нужно пройти после включения оборудования.
К недостаткам такого типа датчиков угла положения также относится то, что невозможно определить пропуск импульсов от энкодера по каким-либо причинам. Это приводит к накоплению ошибки определения угла поворота вала, до тех пор, пока не будет пройдена нуль-метка (она-же "Контрольная метка").
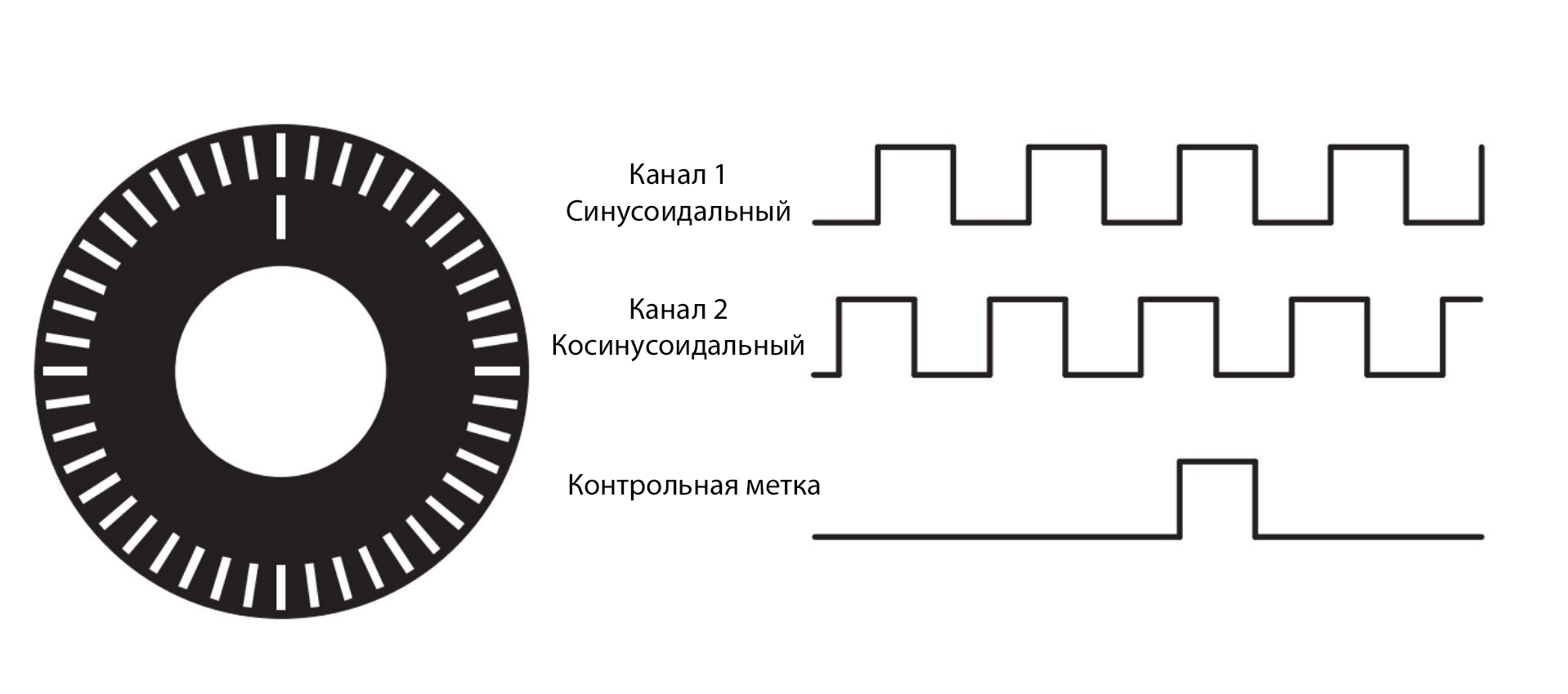
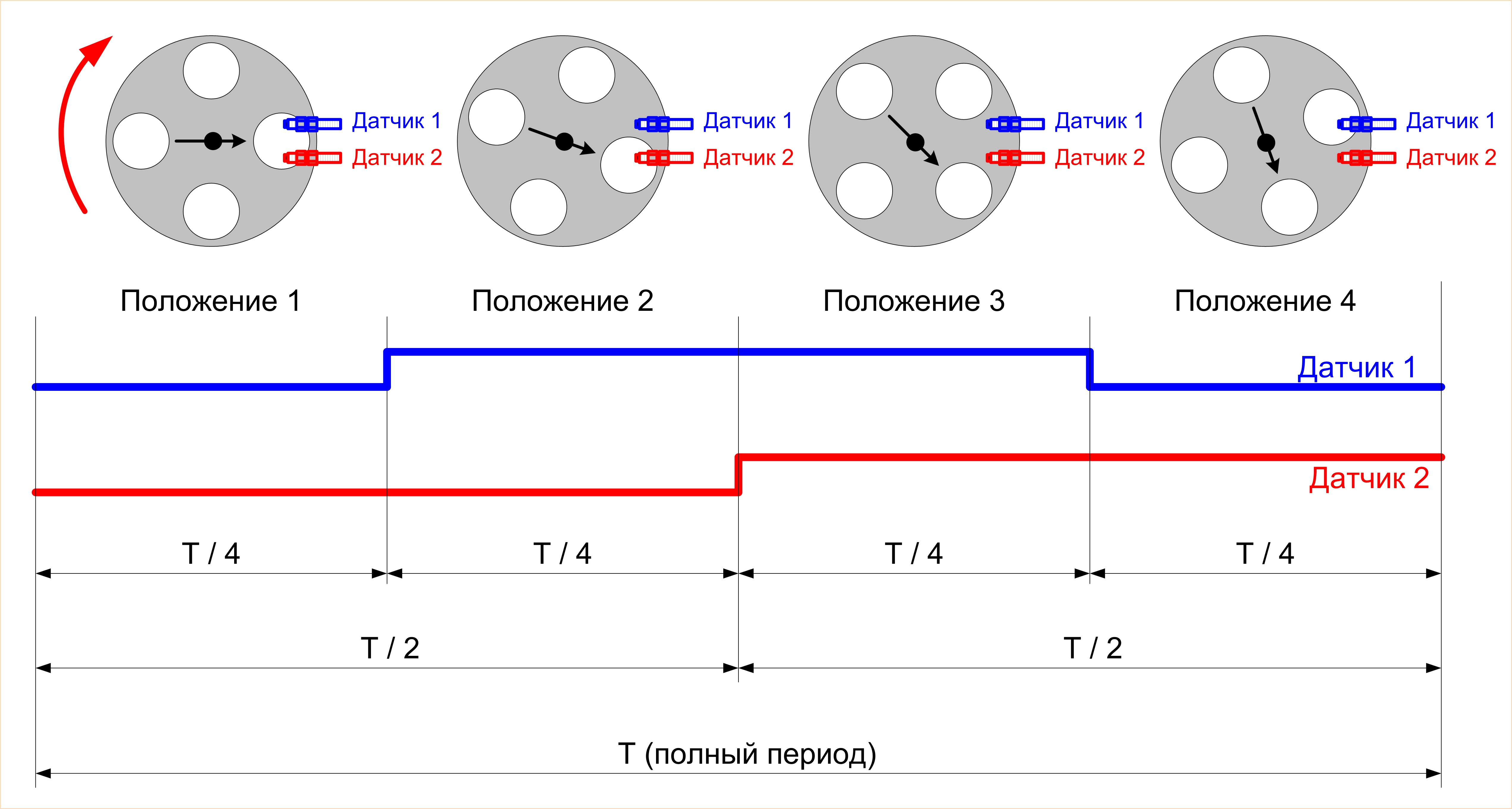
Для определения направления вращения применяются два измерительных канала («синусный» и «косинусный»), в которых идентичные последовательности импульсов (меандр) сдвинуты на 90° относительно друг друга.
– Абсолютный – энкодер возвращает своё абсолютное положение (пример: переменный резистор в сервоприводе).
Абсолютные энкодеры выдают на выходе сигналы, которые можно однозначно интерпретировать как угол поворота вала датчика угла. Датчики угла этого типа не требуют привязки системы отсчёта к какому-либо нулевому положению.
Энкодеры различаются по принципу действия:
- Оптические;
- Магнитные (на датчиках Холла);
- Со щеточными контактами;
- Резисторные (потенциометры) чаще применяются как датчик положения, которые будет лучше обсудить отдельно;
- Индуктивные;
- Ёмкостные.
По допустимому углу поворота вала подразделяются на:
- С ограниченным диапазоном работы;
- С неограниченным диапазоном работы.
Наибольшее применение получили оптические, магнитные и механические энкодеры. О них сегодня и пойдёт речь.
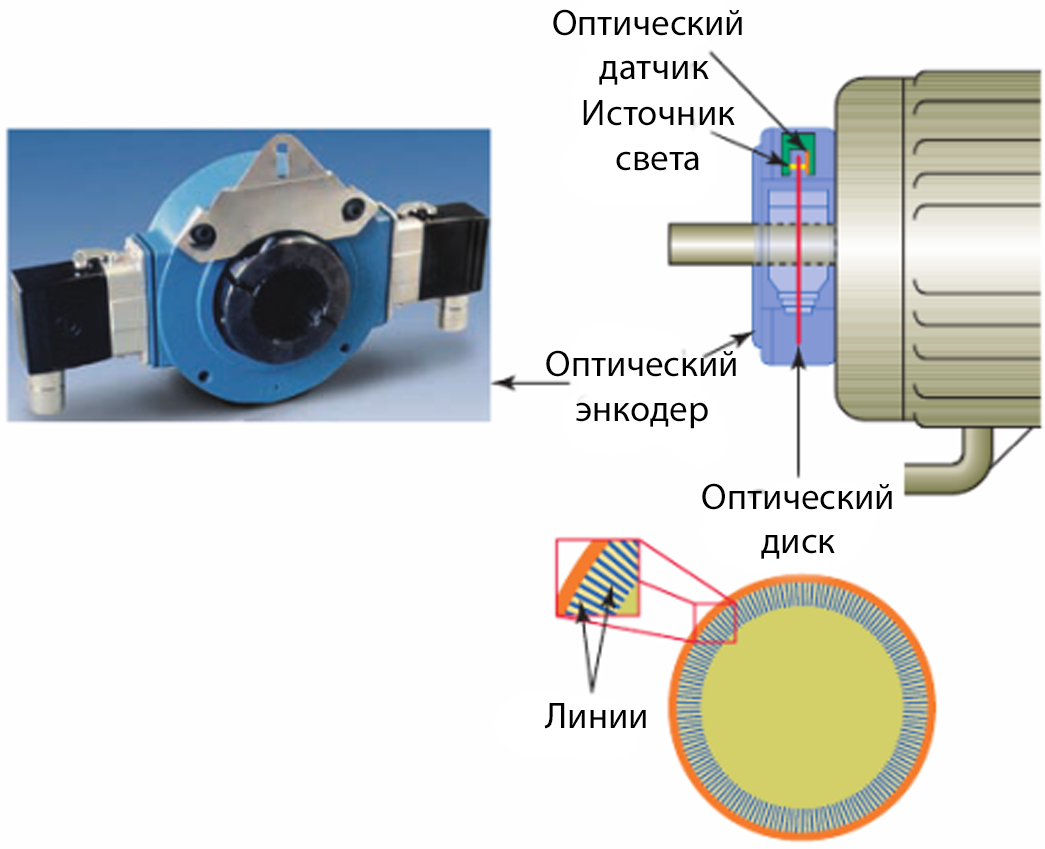
Оптические энкодеры
Инкрементный оптический энкодер
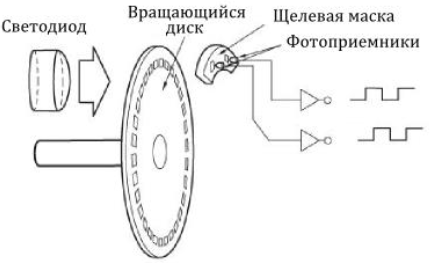
На валу оптического энкодера установлен диск с окнами прерывания по периметру, напротив которых размещены светодиод и фототранзистор, обеспечивающие формирование выходного сигнала в виде последовательности прямоугольных импульсов с частотой, пропорциональной как количеству окон прерывания, так и скорости вращения диска/вала. Количество импульсов отображает угол поворота. Оптические энкодеры работают по двум принципам: на просвет и на отражение.
Оптические поворотные инкрементные энкодеры стали наиболее популярным устройством для измерения угловой скорости и положения в двигателях, на валу колеса или рулевого механизма. Простейшим типом инкрементного энкодера является одноканальный тахометр, обычно состоящий из механического прерывателя света, производящего определенное количество прямоугольных или синусоидальных импульсов, при каждом обороте вала
Увеличение числа импульсов увеличивает разрешение и стоимость модуля. Разрешение энкодера измеряется в числе отсчетов на оборот (CPR). Типичный энкодер имеет значение 2 000 CPR, в то же время промышленный оптический энкодер может иметь параметр CPR равный 10 000. С точки зрения требуемого диапазона, конечно важно, чтобы энкодер был достаточно быстрым, чтобы успевать считывать значения на предполагаемой скорости вращения.
Эти относительно недорогие устройства используются в качестве датчиков скорости в цепи обратной связи в системах управления, работающих на средних и высоких скоростях, но на очень малых скоростях чувствительны к шумам и проблемам со стабилизацией из-за ошибок квантования. Здесь нужно искать компромисс между разрешением и скоростью обновления: улучшенная переходная характеристика требует большей скорости обновления, которая для данного числа линий уменьшает число возможных импульсов энкодера для интервала дискретизации. Проще говоря они не предназначены для работы на малых скоростях.
В случае с одиночным энкодером (имеющего всего один канал приёма светового сигнала), который лишь считает количество импульсов и по количеству определяет угол поворота, можно выделить значительные недостатки среди которых:
- Ошибки инициализации (при старте системы, не ясно в каком положении находится энкодер до тех пор, пока не будет получен сигнал с контрольной метки), но этот недостаток может быть решён программным путём;
Если электродвигатель оборудован электромагнитным тормозом, т.е. когда исключено вращение электродвигателя при выключенной системе, в её памяти может храниться информация о последнем положении электродвигателя. На практике-же чаще встречается решение с применением абсолютного оптического энкодера.
- Ошибки при подсчете импульсов на границах (возможны ложные срабатывания из-за «дребезга» (промежуточных положений между полностью перекрытым источником света и полностью открытым);
- Невозможность определить направление движения.
Сдвоенный (квадратурный) энкодер считает количество импульсов, учитывая направление. Квадратурные энкодеры учитывают направление вращения путем добавления второго канала, смещенного относительно первого, поэтому результирующие последовательности импульсов сдвинуты по фазе на 90 градусов, как было показано на рисунках выше.
Разновидность инкрементального энкодера, которая состоит из двух датчиков, срабатывающих со смещением в полшага, позволяет практически полностью гарантировать отсутствие ложных срабатываний на границе одного из энкодеров.
По сравнению с одиночными энкодерами имеют очевидные преимущества, но всё так же не эффективны на низких оборотах и не позволяют (сами по себе) определить положение системы при старте.
Абсолютный оптический энкодер
Думаете тут что-то конкретно отличается? Нет. Ну как... Почти.
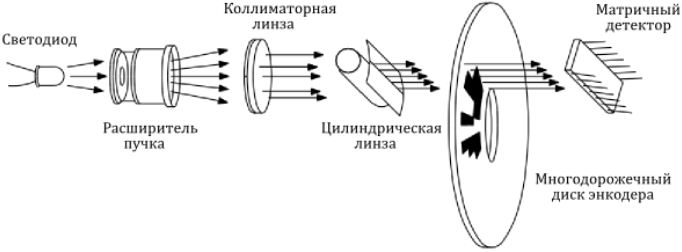
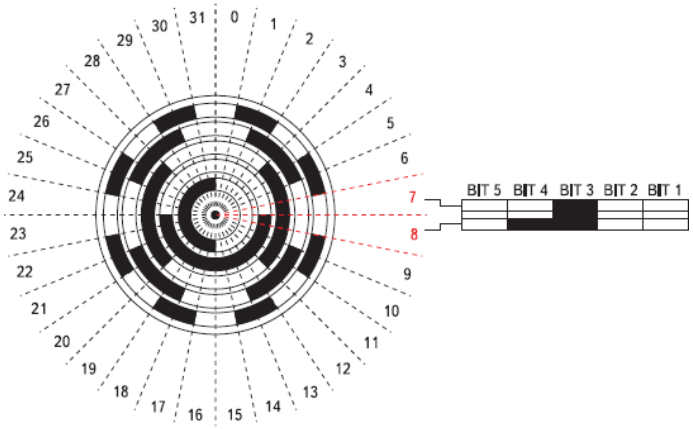
В данном случае принцип действия (физика процесса) абсолютно такой же. У нас имеется источник света и приёмник этого самого света. Однако тут мы используем не точечный пучок света, а рассеянный. Таким образом сквозь диск мы пропускаем свет определённой площади. По другую сторону у нас так же уже не точечный приёмник света, а матричный. Это означает что сигнал, который принимает приёмник, так равен определённой величине, а не логическому нулю либо единице (свет есть либо света нет). Вместо последовательного потока битов, как в инкрементном датчике, абсолютные оптические энкодеры обеспечивают параллельный вывод слова данных с уникальным кодом шаблона для каждого дискретного положения вала. Чаще всего используется код Грея, двоичное и двоично-десятичное кодирование. Характерной особенностью кода Грея является то, что только один бит, изменяется за раз, помогая избежать тем самым асинхронных неоднозначностей, обусловленными электронными и механическими допусками элементов.

Абсолютные энкодеры лучше всего подходят для медленных и/или редких поворотов, таких как кодирование угла поворота баллера руля, в отличие от измерения высокоскоростного непрерывного вращения, которое потребует вычисления смещения вдоль всего пути движения.
Однако и тут не всё так гладко, недостатки так же имеются:
- Относительная сложность реализации (несколько датчиков);
- Ограничения в разрешающей способности (для большей точности требуется больше каналов);
- Параллельный вывод данных, который требует более сложного интерфейса из-за большего количества проводов. 13-ти битный абсолютный энкодер, использующий дополнительные выходные сигналы для помехоустойчивости потребует 28-ми жильный кабель (13 сигнальных пар плюс питание и заземление) вместо шести в случае с резольвером или инкрементным энкодером;
- Чувствителен к ударам и вибрациям.
Где на практике применяются энкодеры на судах? Далеко ходить не будем - лифт. Многие лифты используют информацию с энкодеров чтобы понимать на какой именно палубе находится кабина. Эти данные указываются в прошивке в виде диапазонов типа 600-700 - палуба 4, 750-850 - палуба 5.
Магнитный энкодер
Магнитный энкодер работает по тому же принципу что и оптический: мы получаем меандры определённой частоты, но не за счёт света, а за счёт магнитного поля. Преобразование углового перемещения вала в электронный сигнал реализуется бесконтактно на основе эффекта Холла и допускает обработку сигналов на скоростях до 60 тыс. об/мин.
Если очень кратко - эффект Холла - это эффект возникновения разности потенциалов в проводнике при попадании этого проводника в постоянное магнитное поле и подаче на него питания. Представьте себе проводник размером и формой повторяющий денежную купюру. Левая и правая сторона подключены к источнику постоянного тока, который и проходит через проводник. Если проводник исправен, то без воздействия магнитного поля напряжение в верхней и нижней части проводника будет близким к нулю.
Но если в системе появится магнитное поле, линии которого расположены под прямым углом к течению тока, на электроны и дырки в проводнике начинает воздействовать сила Лоренца. Частицы начинают отклоняться. Соответственно, электроны соберутся на одной стороне проводника, а на другой их не будет.
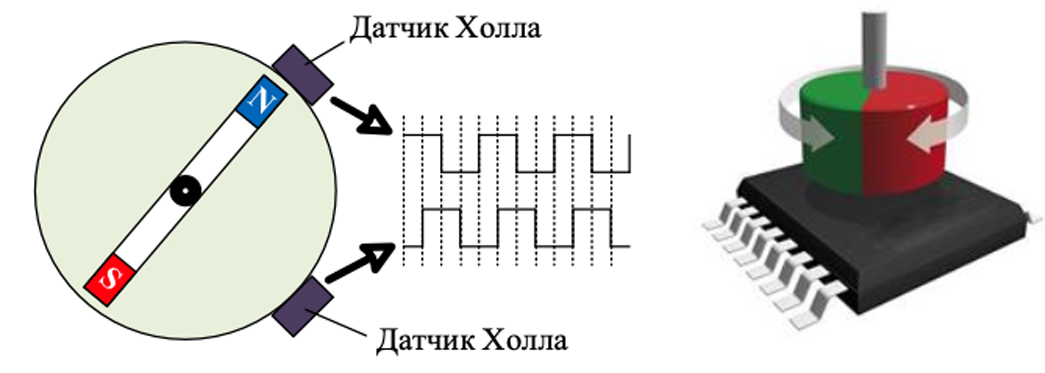
Выше представленный магнитный энкодер высокоскоростное вращение внешнего вала, на котором закреплен цилиндрический постоянный магнит, воспринимается датчиком Холла, совмещенным на одном полупроводниковом кристалле с контроллером обработки сигналов. При вращении полюсов постоянного магнита над микросхемой с датчиком Холла переменный вектор магнитной индукции наводит напряжение Холла, содержащее информацию о мгновенном значении угла поворота вала. При постоянном вращении возникает синусоидальное напряжение. Электронная схема усиливает и преобразует этот сигнал в удобную для обработки форму. На базе датчиков Холла строят инкрементальные абсолютные ШИМ–энкодеры.
Датчики Холла, размещенные на кристалле микросхемы, фиксируют напряженность магнитного поля магнита, где затем рассчитывается абсолютное значение угла поворота магнита. Функциональные возможности, встроенные в микросхему, позволяют запрограммировать «нулевое» положение магнита, относительно которого будет рассчитан угол, произвести диагностику и откалибровать положение магнита над микросхемой для лучшей точности. Энкодер малочувствителен к рассогласованию взаимного положения микросхемы и магнита, а также к вариациям величины воздушного зазора.
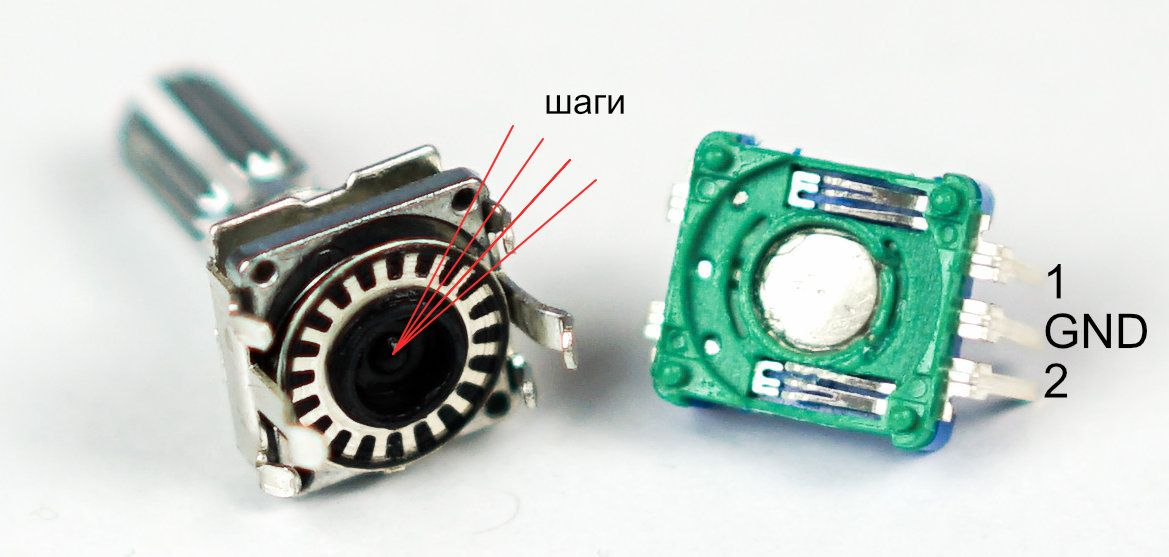
Механические энкодеры
Механические энкодеры содержат диск из диэлектрика или стекла с нанесёнными выпуклыми, проводящими или непрозрачными участками. Считывание абсолютного угла поворота диска производится линейкой переключателей или контактов в случае механической схемы и линейкой оптронов в случае оптической. Выходные сигналы представляют собой код Грея, позволяющий избавиться от неоднозначности интерпретации сигнала. Основным недостатком механического энкодера является дребезг контактов, который может приводить к неправильному подсчёту и определению направления вращения.
Больше скачать о них нечего. Мы так же получаем сигнал в виде меандр частоты пропорциональной угловой скорости вращения энкодера.
Итого
Думаю что у вас не составит проблем понять принцип действия всех остальных типов энкодеров, которые я не разбирал в рамках статьи. Нам нужно получить сигнал, который будет пропорционально равен угловой скорости вращения вала/положения чего-либо. Сегодня мы заострили своё внимание на измерении вращения. Как-нибудь подробнее разберём датчики положения.
Если у вас остались какие-либо вопросы/правки - обращайтесь в курилку. Я всегда там на связи.