Reborn UART Drivers
@a_i_r_oПодключение драйверов по UART на Reborn 2.
1. Кладем наш обесточенный принтер на бок, открываем крышку, откручиваем крепление вентилятора.
2. Вынимаем драйвера из платы. Все драйвера стоят крутилкой вниз по отношению к нашей задней стенки принтера. Так же вынимаем джамперы которые стоят (10 штук).
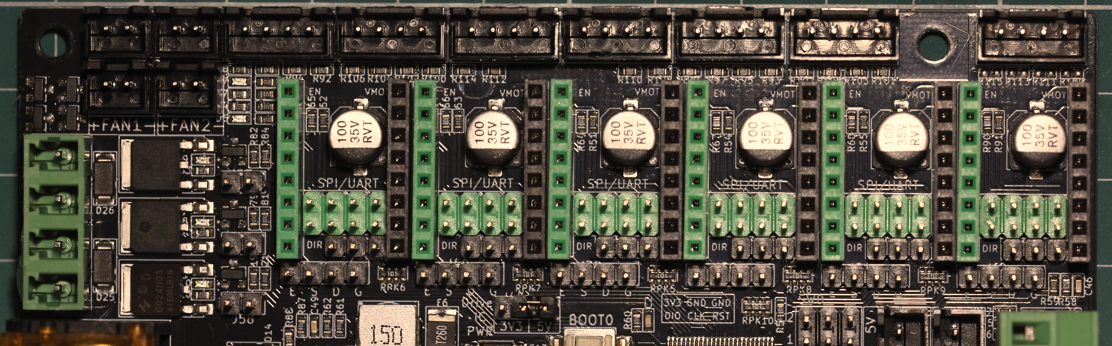
3. Вставляем джамперы в таком виде обратно на плату
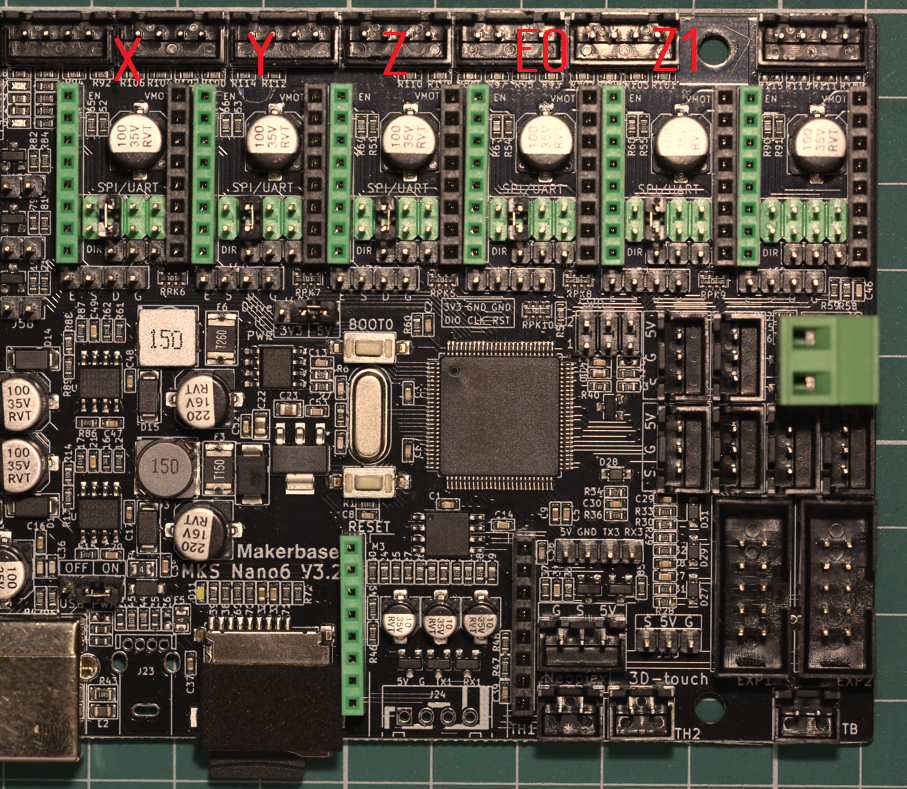
4. Вставляем драйвера обратно. !!!ВАЖНО!!! Не перепутайте расположение драйверов, как я говорил выше крутилка должна находиться внизу по отношению к нашей задней стенки принтера.
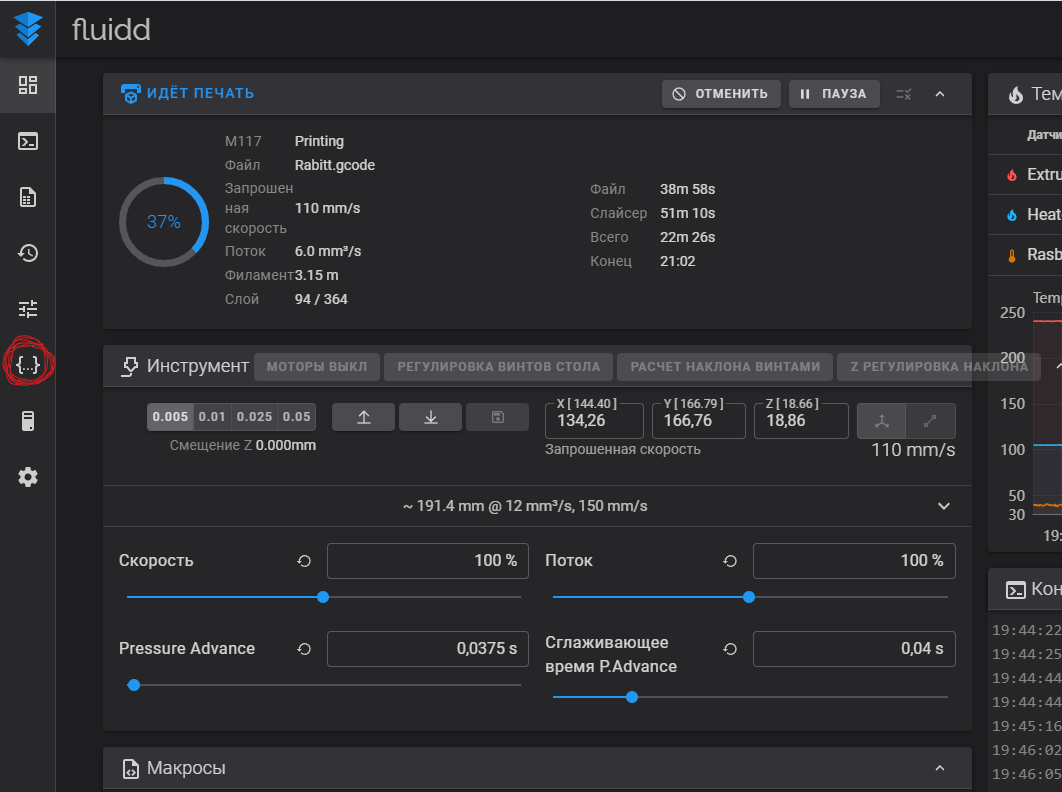
5. Собираем принтер. Включаем. Ждем загрузки одноплатника. Заходим во Fluid или Mailsail по IP-адресу вашего устройства. Открываем файл конфигурации.
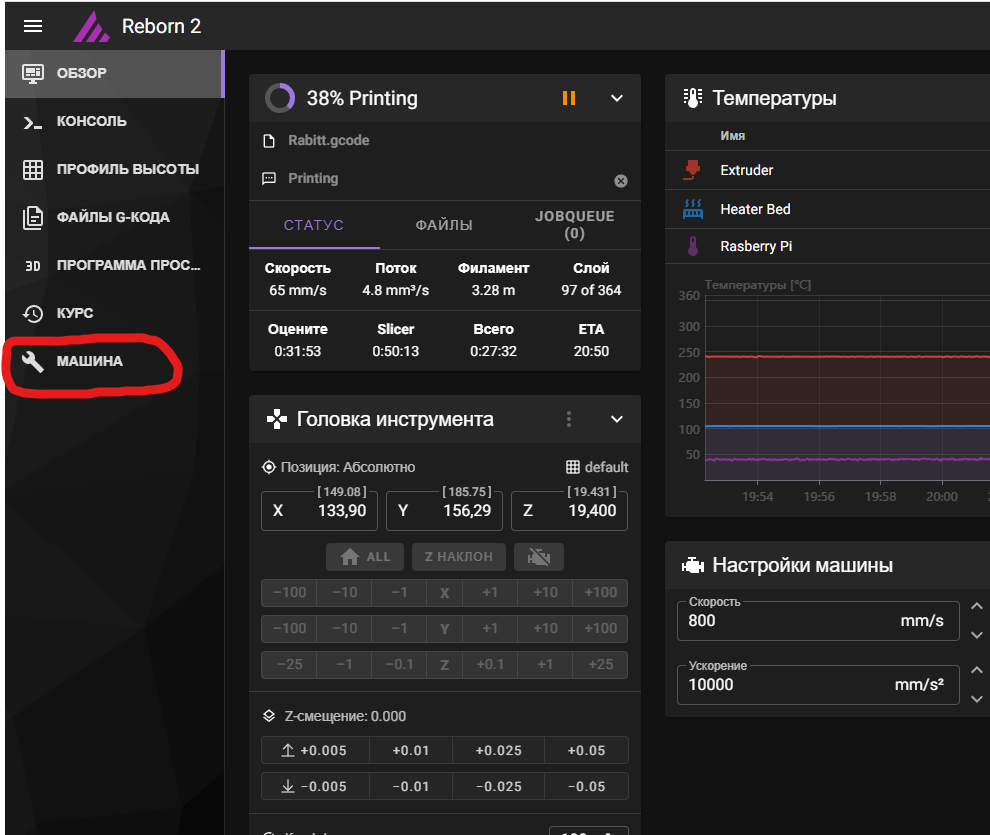
6. Смотрим чтобы у нас было точно так же. Если вы брали конфиг из нашей группы @reborn2support в Telegram то при включении вашего принтера и заливке того конфига все должно работать. Вам останется лишь настроить количество шагов rotation_distance для вашего фидера (если у вас не salfin или orbiter 2 а стоковый фидер).
7. Удачи в 3D-печати ;-)
[tmc2209 stepper_x]
uart_pin: PD5
run_current: 0.800
hold_current: 0.400
#interpolate: false
[stepper_x]
step_pin: PE3
dir_pin: PE2
enable_pin: !PE4
microsteps: 16
rotation_distance: 40
endstop_pin: !PA15
position_endstop: 0
position_max: 325
homing_speed: 50
#~~~~~~~~~~~~~~~~~~~~~~~~
[tmc2209 stepper_y]
uart_pin: PD7
run_current: 0.800
hold_current: 0.400
#interpolate: false
[stepper_y]
step_pin: PE0
dir_pin: PB9
enable_pin: !PE4
microsteps: 16
rotation_distance: 40
endstop_pin: !PD2
position_endstop: 0
position_max: 325
homing_speed: 50
#~~~~~~~~~~~~~~~~~~~~~~~~
[tmc2209 stepper_z]
uart_pin: PD4
#interpolate: False
run_current: 0.650
hold_current: 0.400
[stepper_z]
step_pin: PB5
dir_pin: PB4
enable_pin: !PB8
microsteps: 16
rotation_distance: 8
endstop_pin: !PC8
#position_endstop: 0.115
homing_speed: 10
second_homing_speed: 2
position_min: -2
position_max: 350
#~~~~~~~~~~~~~~~~~~~~~~~~
[tmc2209 stepper_z1]
uart_pin: PD8
#interpolate: False
run_current: 0.650
hold_current: 0.400
[stepper_z1]
step_pin: PD15
dir_pin: PA1
enable_pin: !PA3
microsteps: 16
rotation_distance: 8
endstop_pin: !PC4
#~~~~~~~~~~~~~~~~~~~~~~~~
[tmc2209 extruder]
uart_pin: PD9
run_current: 0.150
hold_current: 0.050
[extruder]
step_pin: PD6
dir_pin: !PD3
enable_pin: !PB3
microsteps: 16
rotation_distance: 4.615
pressure_advance: 0.06
nozzle_diameter: 0.400
filament_diameter: 1.750
max_extrude_only_distance: 1400
#min_extrude_temp: 0
heater_pin: PE5
sensor_type: PT1000
sensor_pin: PC1
pullup_resistor: 4700
#control: pid
#pid_Kp=12.856
#pid_Ki=0.546
#pid_Kd=75.692
min_temp: 0
max_temp: 350
#~~~~~~~~~~~~~~~~~~~~~~~~