Позиционирование и Bluetooth
Упоминая радио технологию Bluetooth сейчас в первую очередь на ум приходят ассоциации, связанные с использование беспроводных наушников или устройств hands free. Разработчики Bluetooth в далеком 1998 г. изначально фокусировались на простых функциях, относящихся к телефонии: поддержка беспроводной гарнитуры, интерком, замена беспроводного телефона. С тех пор сфера применения технологии несколько изменилась, и сейчас сместилась в сторону Bluetooth аудио. Однако это далеко не все то, на что способен Bluetooth. Одна из новых областей применения – позиционирование внутри помещений. Так, в 2021 году было поставлено 136 миллионов Bluetooth тэгов и персональных трекеров. И экосистема решений Bluetooth для позиционирования продолжает расширяться. Такие применения включают в себя: поиск объектов, определение координат в реальном времени, навигацию внутри помещений.
В общем можно рассмотреть две основные задачи, связанные с позиционированием:
· определение дистанции
· определение направления
Для определения расстояния между двумя объектами может использоваться Bluetooth передатчик, располагаемый в одной точке пространства, и Bluetooth приемник, располагаемый в другой, удаленной от первой точке. Измеряя уровень принимаемого сигнала RSSI можно оценить дистанцию между этими точками с учетом модели затухания радиоволны.
Точности такого метода может оказаться не достаточно, ведь реальная среда распространения сигнала отличается от ожидаемой модели. Кроме того может потребоваться калибровка передатчика. В качестве аналогии, представьте себе попытку определения дальности до заблудившегося в лесу грибника по громкости его криков “ау”, особенно если в ответ приходит эхо. Тем не менее RSSI метод может вполне быть использован для приложений где не требуется определения точных координат, а достаточно только информации о близости объекта. Например, для начального обнаружения владельца автомобиля с целью дальнейшей разблокировки замка двери или для автоматической блокировки управления опасным оборудованием, в случае когда оператор этого оборудования покинул рабочую зону.
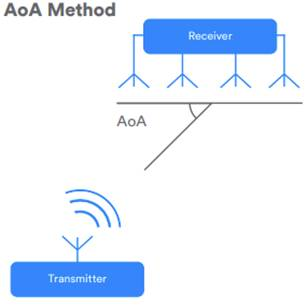
Никаких специальных методов для определения дистанции в текущем и предыдущих стандартах Bluetooth не предусмотрено. Однако, в стандарте Bluetooth начиная с версии 5.1 появились возможности решения другой задачи – определения направления на объект. Это подразумевает использование антенной решетки либо на стороне приемника, в этом случае определяется угол прихода сигнала (AoA),
либо на стороне передатчика – определяется угол ухода сигнала (AoD).
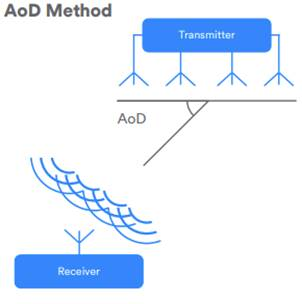
Несколько антенных элементов, разнесенных между собой в пространстве, позволяют определить разницу в фазе пришедшего сигнала между антеннами и соответствующее ему направление. Возможная аналогия - это наличие бинаурального слуха у человека, что дает возможность легко локализовать источник звука.
Определение одного лишь направления недостаточно для определения координат объекта. Несколько приемников (AoA) либо нескольких передатчиков (AoD) обеспечат разрешение координат.
Стандарт 5.1 описывает возможность передачи непрерывного тонального сигнала (CTE) после определенного пакета данных. Интерфейс Bluetooth контроллера расширен командами для передачи CTE, для сканирования, синхронизации и оцифровки последовательности. Цифровые IQ отсчеты передаются хосту на стороне приемника. Стандарт не описывает алгоритм обработки сигналов для определения направления/азимута, что дает большие возможности для реализации конкурентных преимуществ. Например, алгоритм может быть устойчивым к приему отраженных сигналов, возникающими в индустриальном окружении. Также стандарт не определяет параметры антенной решетки, что отдается на откуп разработчикам системы позиционирования.
Следует отметить, что для работы одноканального Bluetooth передатчика/приемника с антенной решеткой требуется коммутация антенн. Одним из параметров команд контроллера является последовательность (switching pattern) по которой производится переключение антенных элементов в процессе приема/передачи сигнала CTE.
Несколько слов про возможные применения разных методов определения направления. AoA метод хорошо подходит для поиска объектов или для отслеживания объектов/персонала в реальном времени. К передатчикам – тегам не предъявляется специальных требований по обработке сигнала, что позволяет использовать недорогие SoC, обеспечивающие длительное время работы от батарейки. В то время как AoD метод подходит для решения задач навигации внутри помещений. Например, мобильный телефон с поддержкой Bluetooth AoD direction finding, принимая сигналы от нескольких AoD радиомаяков, может вычислять свои координаты. В данном случае обеспечивается конфиденциальность и не предъявляются специальные требования к антенне мобильного телефона. В обоих случаях может быть достигнута точность определения координат порядка десятков сантиметров.
Буквально пару дней назад прошел семинар, посвящённый технологии Bluetooth для позиционирования https://www.bluetooth.com/bluetooth-resources/positioning-webinar/. В нем развенчиваются некоторые из мифов об использовании технологии, такие как невысокая дальность работы, либо невозможность функционирования в сложных радио условиях.
В заключении можно сказать что развитие Bluetooth стандарта продолжается и в следующей версии можно ожидать появление функциональности для точного определения дистанции.