Настройка 3D принтера. Прошивка SHUI
Владимир ШумовДополнение к https://shui.hardisoft.ru
Настройка кинематики.
На этом этапе необходимо добиться правильного движения осей и выполнения парковки.
Под правильным будем понимать следующее:
- При нажатии на кнопку <плюс> оси X, голова движется вправо
- При нажатии на кнопку <плюс> оси Y, голова движется вдаль
- При нажатии на кнопку <плюс> оси Z, стол отодвигается от головы
- При нажатии на кнопку <парковка по всем осям>, голова последовательно осуществляет обход датчиков окончания осей
Начало системы координат в принтере - ближний левый угол. Предпочтительно! Если вы считаете это не так, а вы вправе считать нулем любой угол стола вашего принтера, либо пересмотрите свои убеждения, либо убедитесь, что и положительное направление оси и вообще ее направление вы тоже видите верно.
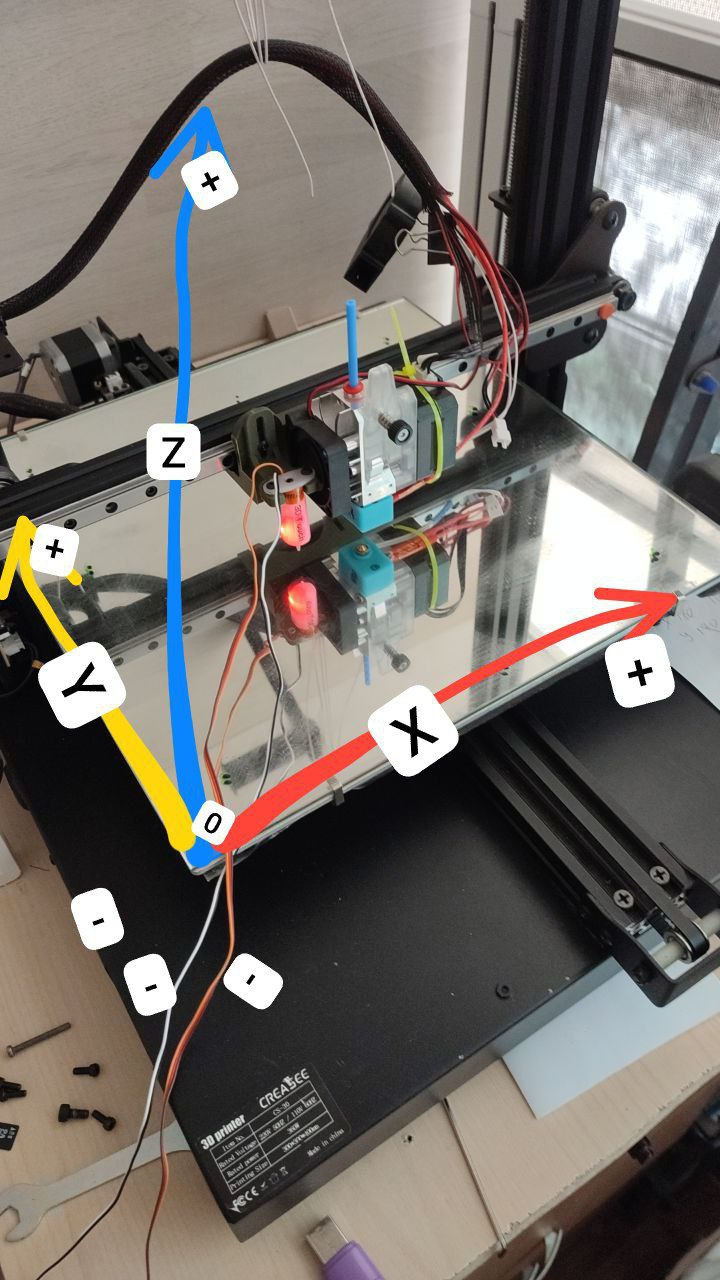
Спасибо за фото участникам группы SHUI-PUBLIC. https://t.me/denis499m, https://t.me/Fahnrich75
Выбор кинематики
Под кинематикой в данном случае понимается то, как и какие моторы принтер использует при перемещении головы по осям. Прошивка SHUI поддерживает несколько вариантов кинематики. Наиболее популярные это XYZ, CoreXY, Markforged. О том, как работают эти кинематики, есть много статей.
Если вы не знаете, какая у вас кинематика, можно провести простой тест:
- Откройте настройку моторов и убедитесь, что число шагов для X и Y одинаково. Обычно это 80 или 160, в зависимости от установленных драйверов
- В настройке выбора кинематики выберите XYZ
- Откройте виджет Перемещение и нажмите на кнопку <Отключить моторы>
- Вручную передвиньте голову в центр стола
- Выберите шаг перемещения 10мм
- Нажмите на <плюс> оси X. запомните, как передвинулась голова. Варианты:
* по горизонтали
* по диагонали от левого ближнего угла к дальнему правому - Нажмите на <плюс> оси Y. запомните, как передвинулась голова. Варианты:
* вперед или назад
* по диагонали от правого ближнего угла к дальнему левому
По результатам этого теста можно определить, какая кинематика используется на вашем принтере.
Если обе оси движутся по описанным диагоналям - кинематика CoreXY, если по прямым, то XYZ, если одна ось движется по прямой, а вторая по диагонали - Markforged
Если ни один из вариантов не подошел, скорее всего у вас не верно подключены шлейфы моторов или настроен маппинг портов, но об этом позже
Укажите в настройках прошивки тип кинематики принтера, выйдете из настроек, таким образом их сохранив
Настройка инверсии моторов
Необходимо провести тест, после которого будет понятно, какие моторы потребуется инвертировать. Не выполняйте инверсию в процессе теста, а только после его завершения! Не выполняйте парковку, ее еще не настроили!
На этом этапе нажатие на кнопки <плюс> <минус>виджета управления перемещением приводит к перемещениям слева-направо или вперед-назад (правильность оси не учитываем) . Если это не так, скорее всего вы не верно выбрали кинематику, или число шагов по осям X, Y разное, а кинематика CoreXY или Markforged
В зависимости от кинематики дальнейшие настройки следующие:
- Откройте виджет Перемещение и нажмите на кнопку <Отключить моторы>
- Вручную передвиньте голову в центр стола
- Выберите шаг перемещения 10 мм
XYZ
- Выберите ось X, нажмите на <плюс>, если голова едет вправо - все в порядке, если влево, мотор оси X надо инвертировать
- Выберите ось Y, нажмите на <плюс>, если голова едет вперед (вдаль) - все в порядке, если это не так, мотор оси Y надо инвертировать
CoreYX
Чаще всего, для этой кинематики оба мотора XY (в терминах CoreXY - AB), должны иметь одинаковое значение инверсии. При неверно настроенной инверсии моторов может быть так, что при нажатии на <плюс> оси X передвигаться может ось Y. Можно расписать все 4 варианта инверсии моторов и как исправить неверные настройки, но есть очень простой метод, дающий верный результат. Метод предложен автором прошивки SHUI и описан в сообщении телеграмм канала: https://t.me/c/1197511741/156558/194196
Опишу подробнее:
- В настройке кинематики, переключите на XYZ
- Откройте виджет Перемещение и нажмите на кнопку <Отключить моторы>
- Вручную передвиньте голову в центр стола
- Выберите шаг перемещения 10 мм
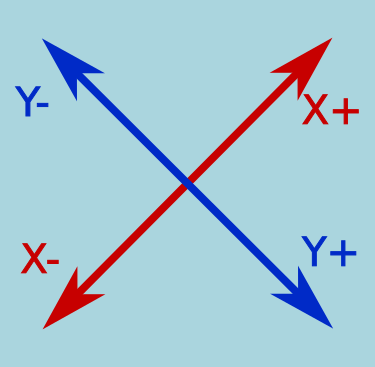
- Выберите ось X, нажмите на <плюс>, если голова едет по диагонали вправо и вдаль - все в порядке, если наоборот ось X надо инвертировать
- Выберите ось Y, нажмите на <плюс>, если голова едет по диагонали вправо и приближается - все в порядке, если наоборот ось Y надо инвертировать
- В настройке кинематики, переключите на кинематику вашего принтера
Вот правильное перемещение:
Ось Z, для всех вариантов кинематики
- Выберите шаг перемещения 1 мм
- Выберите ось Z, нажмите на <плюс>, если стол отодвигается от головы - все в порядке, если это не так, мотор оси Z надо инвертировать
Откройте виджет конфигурирования моторов, и в разделе инверсии измените на противоположное состояние значка инверсии для моторов, необходимость изменения которых определили в проведенном тесте, проверьте правильность настроек:
- Откройте виджет Перемещение и нажмите на кнопку <Отключить моторы>
- Вручную передвиньте голову в центр стола
- Выберите шаг перемещения 10 мм
- При нажатии на кнопку <плюс> оси X, голова движется вправо
- При нажатии на кнопку <плюс> оси Y, голова движется вдаль
- При нажатии на кнопку <плюс> оси Z, стол отодвигается от головы
Настройка шагов на мм
Цель этой настройки добиться такого поведения передвижения по осям, чтобы фактическое перемещение по всем осям соответствовало заданному. Задано перемещение X 50 мм - фактическое перемещение по X оси так же 50 мм.
Влияющие факторы:
- Дробление шага мотора
- Параметр в пошивке <число шагов на мм>
Дробление шага мотора
Шаговый мотор имеет фиксированные положения ротора. Переход между фиксированными положениями - шаг. Драйвер мотора может удерживать ротор в промежуточном положении. Число промежуточных положений может быть настроено. Переход между двумя промежуточными положениями - микрошаг.
Настроить дробление шага можно с помощью перемычек под драйверами. По-умолчанию перемычки M1 и M2 (или M0 и M1, в любом случае это две первые по счету) установлены. Однако, в зависимости от драйверов шаговых двигателей это задает разное дробление шага. Для 2208, 2209, 2226 это 1/16, однако, для 2225 это 1/32. В теории, чем выше дробление, тем выше точность, но тем сложнее просчитать математику перемещения. Для 1/16 на большинстве принтеров дискретность перемещения по осям X Y 1/80 мм, а по оси Z 1/400 мм
Для дальнейших настроек надо определить как подключены драйверы управления моторами. Если они управляются через UART все настройки выполняются в меню прошивки, если нет, то перемычками под драйверами.
Определение типа подключения драйверов моторов
SHUI поддерживает разные варианты подключения драйверов к UART
- Стандартный, реализованный на платах серии RN20, RN30. В терминах прошивки Marlin, хотя, я бы его назвал по производителю платы MKS. В этом типе подключения все драйверы имеют одинаковый адрес, но различаются портом к которому они подключены
- SHUI WiFi - драйверы подключаются к аппаратному WiFi и разделяют его с модулем WiFi. такой тип подключения можно реализовать на платах типа RN12, RN13. Не так давно этот тип подключения совмещен с подключением к свободному порту. Теоретически получается 2 UART, в рамках каждого можно подключить до 4х драйверов с разными адресами. Однако, работать такое подключение будет только для драйверов 2209 и 2226
- SHUI Port - подключение похожее на предыдущее, но используется только свободный порт материнской платы. Рекомендуется PE5 или один из портов свободного слота под драйвер мотора
Если в принтере 2-ой или 3-ий тип подключения, значит вы его выполняли самостоятельно и ничего пояснять не требуется.
Для определения первого типа подключения:
- Открыть конфигурацию Trinamic (Тринамик)
- Выбрать тип подключения Marlin
- Включить детектор
- Нажать на кнопку определения драйверов (кнопка без подписи, на данный момент)
Если пункты подменю слева все загорелись, значит драйверы подключены по UART. Отлично, детектор оставляем включенным. Больше, пока, можно ничего не трогать, если не баловались с настройками. Умолчания дробления шага 1/16, токи мотора такие как для опорного напряжения 1.2V. Далее выходим из настроек до титульного виджета, таким образом выполненная настройка будет сохранена во флешь памяти. Перезагружаем принтер.
После старта в заголовке появится надпись с версией прошивки и плюс /trinamic:4. Однако, если не все драйверы определились, прошивка выдаст сообщение об ошибке. Причину и способ устранения ее подскажут на форуме shui-public
ВНИМАНИЕ! Для кинематик CoreXY, Markforged дробление шаг на мм для моторов A B (X, Y) лучше сделать одинаковым.
Параметр шаги на мм
На этом этапе имеем настроенные направления движения моторов, известное дробление шага 1/16 или 1/32
Для большинства принтеров параметр <шаги на мм> будет иметь значения:
- X, Y микрошаг 1/16 - 80 (80.4)
- X, Y микрошаг 1/32 - 160 (160.8)
- Z микрошаг 1/16 - 400
- Z микрошаг 1/32 - 800
Тем не менее, мало ли чего поставили производители принтера: мотор с другим градусом поворота, шкив не точный, винт с другим шагом. Если уверены что большой шаг 50 мм, не упрется в раму, используйте его, в противном случае 10 мм
- Выберите ось X и сделайте замер от какой нибудь опорной точки на каретке до рамы принтера, приблизительно, большой точности не надо.
- В виджете перемещения выберите шаг 10 или 50 и нажмите на <плюс>
- Предположим, что шаг 50. Снова выполните измерения. Если каретка отодвинулась на 50 мм - все в порядке, если на 25 - увеличьте в настройках моторов число шагов на мм в 2 раза, если на 100 - в 2 раза уменьшите (для CoreXY и Markforged изменения надо производить для моторов A (X) и B (Y) одновременно). Если кратности 2 не заметно, то новое значение числа шагов на мм надо рассчитать по формуле: <НОВОЕ ЗНАЧЕНИЕ> = <СТАРОЕ ЗНАЧЕНИЕ> * <ЗАПРОШЕННОЕ ПЕРЕМЕЩЕНИЕ> / <ФАКТИЧЕСКОЕ ПЕРЕМЕЩЕНИЕ>
- Повторите с пункта 1, если приходилось менять параметр шаги на мм.
- Повторите действие с пункта 1 для осей Y и Z. Для кинематики CoreXY и Markforged достаточно только ось Z
Эту же настройку потребуется повторить уже после того, как будет напечатан тестовый кубик. Надеюсь, что рассчеты пропорций не потребуются, и типовые настройки подойдут: X, Y - 80, Z - 400
Настройка датчиков конца оси (концевики)
Пока не будем рассматривать Bltouch и прочие тачи. Если вы их ставите, значит о том, как настроить кинематику принтера уже знаете.
Концевики имеют всего 2 важные настройки:
- Пассивный уровень - уровень сигнала, когда он не сработал
- Местоположение
Начнем с местоположения
Если концевик стоит рядом с нулем системы координат (с нулем оси), в настройках указываем МИН, если в противоположном конце МАКС. Очень частая ошибка, когда путают точку парковки и начало координат. Например, на сапфирах парковка в дальнем левом углу. Это значит, что концевик оси X стоит в начале оси (МИН), а концевик оси Y - в конце (МАКС)
Пассивный уровень
Отодвиньте каретку и стол от концевиков. Ни один концевик не должен быть нажат. Если в верхнем левом углу горит значок с названием оси, значит уровень данного концевика надо изменить. Был PWR, переключить на GND и наоборот.
Теперь вручную по-нажимайте концевики. Если значки загораются - все в порядке, если нет, ищите неисправность концевика или проверьте настройки портов.
В общем то и все. Можно запускать парковку. Однако см. ниже:
При наличии bltouch повозиться потребуется еще немного
- В настройках уровня стола выберите сенсор bltouch (или bftouch)
- В настройках пассивного уровня сенсора для bltouch укажите GND (установлено по умолчанию)
- В настройках парковки включите <парковка в точке> и задайте центр стола
- Там же укажите <Парковка по сенсору стола>
Вот теперь все. Оси должны двигаться верно, парковка должна работать верно. Но это не значит, что принтер будет печать
Настройка экструдера
Настройка подачи
Калибровка измерителя температуры
Об этом, пожалуй, в отдельной статье.
Настройка уровня стола
Читайте труды Виктора https://shui.hardisoft.ru/, а я пока выдохся. Может, потом продолжу.