Манёвры управления и балансировочные режимы
БольшевикТеперь вернёмся к замкнутым системам. Устойчиво управляемая система может находиться либо в балансировочном режиме, либо в режиме манёвра. Один и тот же, реально протекающий режим может быть интерпретирован и как:
- балансировочный, если соотноситься с одним вектором целей;
- и как режим манёвра, если соотноситься с другим вектором целей.
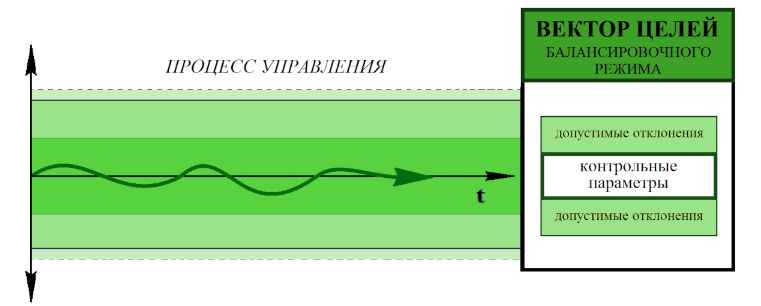
В векторе целей балансировочного режима контрольные параметры неизменны во времени. В реальном устойчивом балансировочном режиме вектор состояния колеблется относительно неизменного положения в подпространстве контрольных параметров, а свободные параметры могут при этом изменяться по-всякому.
Понятие «балансировочный режим» несколько сродни понятию «равновесие», но шире его, поскольку обыденное сознание воспринимает «равновесие» статично — как неподвижную неизменность во времени. В балансировочном же режиме во времени неизменен процесс колебаний системы относительно точки «равновесия», координаты которой неизменны во времени: система проходит через неё, но не может пребывать в ней, хотя бы потому, что отклонения от неё — ниже порога чувствительности средств измерения или управление негибко, обладает конечным быстродействием и не может вовремя остановиться.
Понятие об отрицательных обратных связях отражает факт построения системы управления объектом таким образом, что обнаружение системой управления отклонений объекта от идеального режима, предписанного вектором целей, вызывает появление управляющего воздействия, направленного в сторону возвращения объекта к идеальному режиму. При положительных обратных связях управление помогает возмущению (с момента его возникновения) увести объект от идеального режима в направлении воздействия на объект возмущения.
Если идеальный режим — неизменность во времени вектора целей, в который собраны контрольные параметры, то по причине конечного быстродействия системы управления её воздействие, компенсирующее отклонение от идеального режима (при отрицательных обратных связях), с какогото момента времени само становится возмущающим, и объект проходит точку идеала. Так система управления сама раскачивает объект относительно идеального режима вектора целей (вопрос только в том, амплитуды колебаний лежат в допустимых пределах либо же нет). Лучше всего это видно в устойчивых балансировочных режимах. В неустойчивых балансировочных режимах амплитуда колебаний либо выше допустимой, либо нарастает от колебаний к колебанию даже при отрицательных обратных связях.
Но поскольку возмущение может представлять собой управляющее воздействие со стороны некоего процесса управления извне (его управляющее воздействие — его прямые связи), то при рассмотрении совокупности взаимовложенных процессов управления в отношении любого из вложенных в него процессов самоуправления их положительные обратные связи могут быть названы «поощряющими», а их отрицательные обратные связи — «гасящими», «подавляющими», «сдерживающими», «тормозящими».
Т.е. сам принцип отрицательных обратных связей по контрольным параметрам в теории и практике управления необходим, но всё же он — одна из частностей в теории и практике управления в целом.
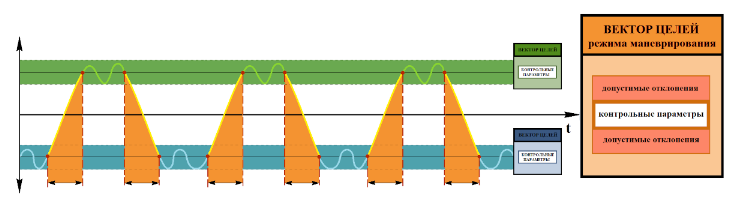
В векторе целей режима манёвра изменяется хотя бы один из контрольных параметров. При рассмотрении реального процесса устойчивого манёвра в подпространстве контрольных параметров вектор состояния отслеживает с некоторой ошибкой управления изменение вектора целей (содержащего только контрольные параметры). На свободные параметры, как и в случае балансировочного режима, ограничения не накладываются.
По отношению к манёвру вектор целей — функция времени, т.е. идеальная траектория и хронологический график прохождения контрольных точек на ней. Множество допустимых векторов ошибки — коридор допустимых отклонений от идеальной траектории с учётом отклонений по времени в прохождении контрольных точек на идеальной траектории.
Режим маневрирования, в котором производные по времени контрольных изменяющихся параметров постоянны (в пределах допустимой ошибки управления), называется установившимся манёвром. Установившийся манёвр сам является балансировочным режимом, из вектора целей которого исключены изменяющиеся в процессе манёвра контрольные параметры.
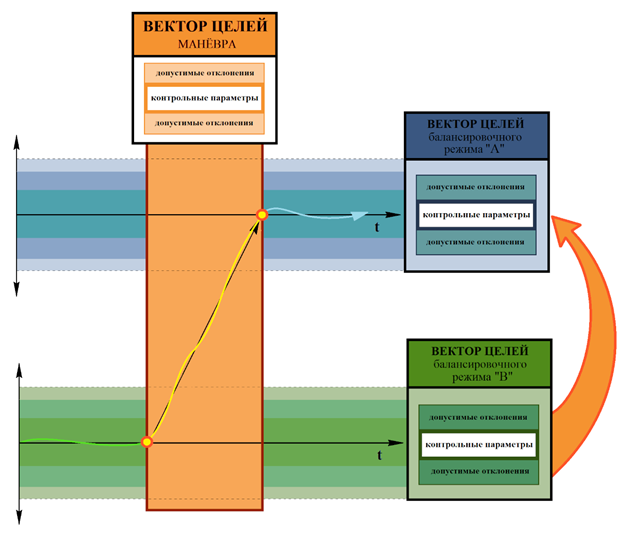
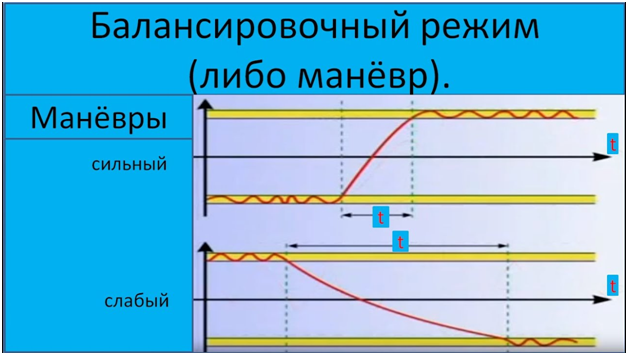
Манёвры в свою очередь разделяются на слабые и сильные. Это разделение не отражает эффективности манёвра. Понятие слабого манёвра связано с балансировочными режимами. Перевод системы из одного балансировочного режима в другой балансировочный режим - это один из видов манёвра. Некоторые замкнутые системы обладают таким свойством, что, если этот перевод осуществлять достаточно медленно, то вектор состояния системы в процессе манёвра не будет сильно отличаться от вектора состояния в исходном и (или) конечном балансировочном режиме за исключением изменяющихся в ходе манёвра контрольных параметров и некоторых свободных параметров, информационно связанных с контрольными.
Разделение манёвров на сильные и слабые в ряде случаев позволяет существенно упростить моделирование поведения замкнутой системы в процессе слабого маневрирования без потери качества результатов моделирования. Поскольку выбор меры качества всегда субъективен, то и разделение манёвров на сильные и слабые определяется субъективизмом в оценке качества моделирования и управления. Но, если такое разделение возможно, то слабому манёвру можно подыскать аналогичный ему (в ранее указанном смысле) балансировочный режим.
Анализ течения моделирующего процесса может протекать в более высокочастотном диапазоне, чем течение реального подобного моделируемого процесса: это даёт возможность заглянуть в будущие варианты развития моделируемого процесса, что является основой решения задач управления вообще и задачи о предсказуемости, в частности. Примеры такого рода моделирования — все аэродинамические и прочностные эксперименты и расчёты в авиации, судостроении и космонавтике. Моделирование высокочастотного процесса в низкочастотном диапазоне позволяет отследить причинно-следственные связи, которые обычно ускользают от наблюдателя при взгляде на скоротечный реальный процесс.
Манёвр перехода из одного балансировочного состояния в другое, отвечающий требованию плавности, если позволит время, распадается на три периода:
• выход из балансировочного режима,
• установившийся манёвр (сам балансировочный режим, но с другим вектором целей),
• вхождение в новый балансировочный режим.
Используемая литература:
Достаточно общая теория управления – Внутренний Предиктор СССР – Санкт-Петербург, 2011 – 464 с.
Мёртвая вода - Внутренний предиктор СССР - Китеж, 2004 - 492 с.
Манёвры и балансировочные режимы, принципы сопоставления и выявления подобия
Манёвры и балансировочные режимы