FPV Двигуни

Давайте зануримося у захопливий світ двигунів для дронів! У цій статті ми розглянемо всі тонкощі побудови двигунів, особливості конструкції та фактори, які можуть впливати на продуктивність і ефективність двигуна. Розуміння головних особливостей допоможе вам обрати ідеальний двигун для дрона.
Рекомендації
"Найкращий двигун для дрона" - поняття суб'єктивне, оскільки кожен двигун працює по-різному. Зрештою, ваш вибір буде залежати від вашого стилю польоту, вимог і бюджету.
При виборі двигуна для 5″, 1600-2000KV призначені для 6S, тоді як 2300-2800KV підходять для 4S. Варіанти з вищим KV, як правило, більш агресивні та енергоємні, в той час як варіанти з нижчим KV є консервативними та ефективними. Ваш вибір буде залежати від вашого стилю польоту і застосування.
Нижче представлені найкращі 5-дюймові двигуни для дронів FPV у 2023 році, на які, на нашу думку, вам варто звернути увагу.
T-Motor Velox Veloce V2207.5 V2 (Бюджетний мотор високої якості)
Velox V2207 V2/V3 - це, мабуть, найдешевші двигуни, які ви можете купити сьогодні. Це бюджетна пропозиція від T-Motor із сучасним дизайном та особливостями: магніти N52, титановий вал і виготовлені відомою компанією T-Motor. Вони пропонують різні варіанти KV, для кінематографічних і довгих польотів, 1750KV чудово підійде для 6S. Для перегонів або більш агресивного фрістайлу обирайте 1950KV-2050KV. Для батареї 4S обирайте 2550KV.

RCinPower Wasp Major (чудовий варіант)
Один з найкращих універсальних 5-дюймових двигунів, доступних на сьогоднішній день, з чудовими характеристиками як в плані потужності, так і в плані ефективності. Це ідеальний вибір як для фрістайлу, так і для гоночних моделей.

EMAX ECO II 2207 (найдешевший із достойних варіантів)
Ці двигуни мають сильні магніти N52 і добротну збірку за привабливою ціною. Хоча ви можете знайти двигуни за менші гроші, проте їх зазвичай не варто купувати.
Кажуть, що Emax продає мотори ECO II за заниженою ціною, просто намагаючись зрівнятися з найдешевшими двигунами на ринку.Ми не можемо це довести, але Emax ECO II зарекомендував себе як один з найкращих бюджетних FPV-двигунів за всі ці роки.
Можливо, це не найкращий двигун з початковою продуктивністю, але чи можна очікувати більшого, якщо це, мабуть, найдешевші двигуни, які варті уваги. Вони чудово підійдуть, якщо ви тільки починаєте або бажаєте зекономити. Це також надзвичайно ефективний двигун, якщо для вас важливий час польоту.
Вони пропонують 1700KV і 1900KV для 6S, 2400KV для 4S. Також випускають двигун 2306, але особисто ми віддаємо перевагу двигуну 2207 з більшим розміром статора, він потужніший і чутливіший за ту ж саму ціну.

iFlight Xing2 2207 (перевірений часом)
Найсучасніший двигун для квадрокоптерів на сьогоднішній день. Конструкція Unibell, титановий вал, дугові магніти для швидшого спрацьовування, потужні магніти N52 та захисне кільце для довшого збереження плавності ходу підшипників.
Серія Xing від iFlight є одним з найкращих двигунів для FPV дронів, виготовлених у 2019 році, і тепер у них є нова серія 2022 року - Xing2, яка є ще кращою. Окрім характерного та унікального вигнутого дзвону двигуна, який робить його надзвичайно міцним, двигуни Xing2 2306 та 2207 також мають безліч чудових особливостей. Наприклад, суцільний вал з титанового сплаву, надійні підшипники 9х4х4, однониткова обмотка та демпфуюче кільце між дзвоном і підшипником, що підвищує довговічність.
Xing2 - це потужний двигун з високим крутним моментом, що забезпечує чутливість і швидкість у польоті. За низьку ціну ви отримуєте двигун найвищого рівня продуктивності, який зазвичай має вищу цінову категорію, що робить цей варіант надзвичайно вигідною пропозицією.
Лінійка двигунів iFlight Xing2 пропонує багато різних KV в залежності від того, яку напругу LiPo ви плануєте використовувати (4S або 6S), пропелери та стилі польоту. Для 2207 є 1855KV (6S) і 2755KV (4S), для 2306 - 1755KV (6S) і 2555KV (4S).

З чого почати?
Перш ніж вибрати двигун, важливо мати хоча б приблизне уявлення про розмір і вагу дрона, який ви плануєте побудувати. Ми проведемо вас через процес визначення розміру двигуна, виходячи з того, який дрон ви намагаєтеся побудувати.
Деякі з найбільш важливих факторів, про які слід пам'ятати, це:
Вага двигуна
Потужність (тяга)
Ефективність (грам на ват)
Крутний момент і реакція (зміна обертів)
Безщіткові та щіткові двигуни
У світі FPV існує два основних типи двигунів: безщіткові та щіткові. Як правило, ми віддаємо перевагу безщітковим двигунам, оскільки вони довговічніші та потужніші, в той час як щіткові двигуни часто використовуються в іграшкових дронах, оскільки вони дешевші у виробництві. У цій статті ми зосередимося виключно на безщіткових двигунах, які є найкращим вибором для більшості FPV-дронів.
Оцінка ваги та розміру рами дрона
Підраховуючи загальну вагу вашого FPV-дрона, обов'язково враховуйте всі компоненти: раму, FC, ESC, двигуни, пропелери, приймач, VTX, антену, ESC, акумулятор, корисне навантаження. Хоча це не обов'язково має бути 100% точна оцінка, але приблизно це оцінити дуже важливо. Краще переоцінити вагу і мати додаткову потужність, ніж недооцінити і страждати під час зльоту.
Визначивши розмір вашої рами, можна встановити максимально допустимий розмір пропелера.
Визначення вимог до тяги
Щоб розрахувати мінімальну тягу, необхідну для вашої комбінації двигуна і пропелера, вам знадобиться приблизна загальна вага вашого дрона. Загальне емпіричне правило полягає в тому, що максимальна тяга, створена всіма двигунами, повинна щонайменше вдвічі перевищувати загальну вагу квадрокоптера. Недостатня тяга може призвести до поганої реакції керування і труднощів при зльоті.
Наприклад, якщо у вас дрон вагою 1кг, сумарна тяга, що створюється всіма двигунами при 100% газу, повинна бути не менше 2 кг. Це 500г тяги, створеної кожним двигуном для квадрокоптера. Звичайно, наявність більшої тяги, ніж потрібно, завжди є бонусом.
Для гоночних дронів відношення тяги до ваги (або відношення потужності до ваги) має бути значно вищим, ніж у наведеному вище прикладі. Співвідношення 10:1 або навіть 14:1 - не рідкість. Для акро і фрістайлу я рекомендую мати співвідношення щонайменше 5:1.
Вище співвідношення тяги до ваги дає квадрокоптеру більшу маневреність і прискорення, але може зробити його складнішим в управлінні, особливо для початківців. Навіть найменший дотик до стіка газу може "вистрелити" квадрокоптером на орбіту, як ракетою. Вміння та досвід пілотування відіграють важливу роль в управлінні цією потужністю.
Навіть якщо ви плануєте повільно і стабільно літати лише з корисним наванженням, прагніть до співвідношення тяги до ваги вище, ніж 3:1 або навіть 4:1. Це забезпечить кращий контроль.
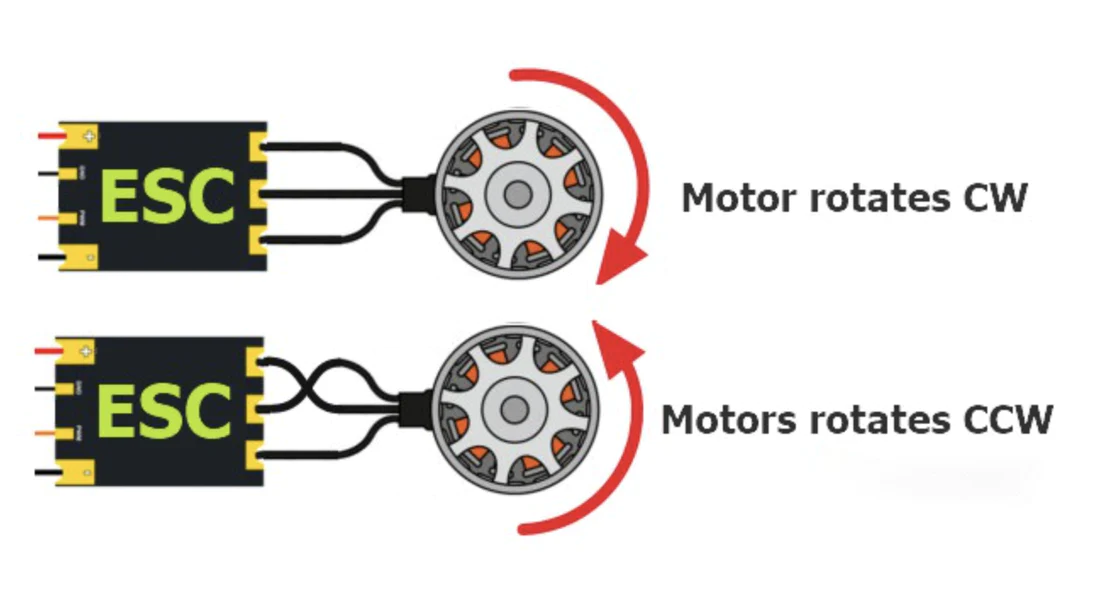
Підключення безщіткового двигуна
Для керування безщітковим двигуном вам знадобиться ESC (електронний регулятор швидкості). На відміну від щіткових двигунів, які мають лише два дроти, безщіткові мають три. Ви можете під'єднати ці дроти до ESC у будь-якому порядку. Щоб змінити напрямок обертання, просто поміняйте місцями два з трьох проводів. Крім того, можна змінити напрямок обертання двигуна за допомогою програмних налаштувань.
Пояснення щодо розміру двигуна
Розмір безщіткового двигуна зазвичай позначається чотиризначним числом - AABB:
"AA" представляє ширину статора (або його діаметр)
"BB" представляє висоту статора, обидва вимірюються в міліметрах
Статор - це нерухома частина двигуна, що складається з "полюсів", обмотаних мідними дротами (обмотками). Ці полюси виготовлені з декількох шарів тонких металевих пластин, ламінованих між собою, з надтонким шаром ізоляції між ними.
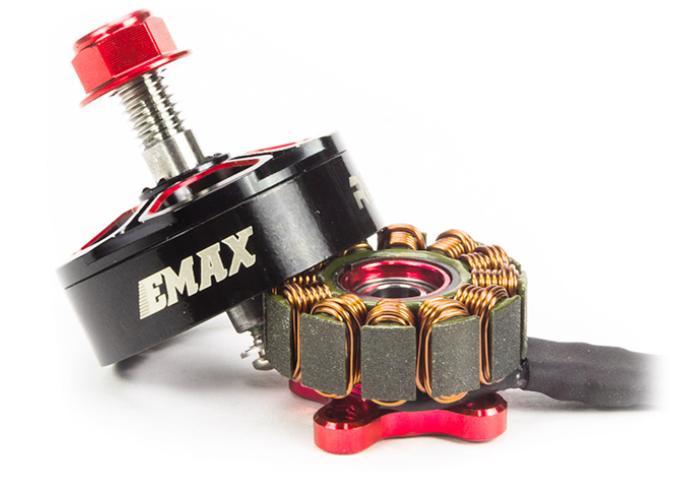
Ключові компоненти двигуна:
Статор двигуна:
Нерухома частина двигуна складається з декількох металевих котушок. Дріт котушки покритий емаллю, щоб запобігти короткому замиканню, оскільки він намотується в кілька шарів. Коли електричний струм проходить через котушки статора, він створює магнітне поле, яке взаємодіє з постійними магнітами на дзвоні, створюючи обертання.
Магніти:
Постійні магніти створюють постійне магнітне поле. У двигунах FPV вони прикріплені до внутрішньої частини дзвона двигуна за допомогою епоксидної смоли.
Дзвін двигуна:
Дзвін двигуна слугує захисним кейсом для магнітів і обмоток. Зазвичай виготовлені з легких металів, таких як алюміній, у деяких двигунах сконструйовані як мініатюрні вентилятори, щоб спрямовувати більший потік повітря над обмотками двигуна для додаткового охолодження під час обертання двигуна.
Вал двигуна:
З'єднаний із дзвоном двигуна, вал є робочим компонентом двигуна, який передає крутний момент, що генерується двигуном, на пропелер.
Збільшення ширини або висоти статора збільшує його об'єм, розмір постійних магнітів, а також електромагнітних котушок статора. В результаті збільшується загальний крутний момент двигуна, що дозволяє йому швидше обертати важчий пропелер і створювати більшу тягу (за рахунок споживання більшого струму). Однак недоліком більшого статора є те, що він важчий і менш чутливий.

Порівняння високих і широких статорів
Ширші двигуни мають більшу інерцію при обертанні, оскільки маса двигуна знаходиться далі від осі обертання, що вимагає більше енергії для зміни обертів. Отже, ширші та коротші двигуни зазвичай менш чутливі, ніж вужчі та вищі, навіть якщо вони мають однаковий об'єм статора і генерують однаковий крутний момент. Ширші та коротші двигуни також мають менші магніти на дзвоні двигуна, що може зменшити його потужність.
Однак ширші двигуни забезпечують краще охолодження завдяки більшій площі поверхні зверху і знизу. Температура має вирішальне значення для роботи двигуна. Коли двигун нагрівається, його здатність генерувати магнітний потік зменшується, що впливає на ефективність і крутний момент.
По суті, ширина і висота статора електродвигуна - це баланс між чутливістю і охолодженням. Рішення залежить від вашого стилю польоту. Наприклад, для повільних кінематографічних польотів з важкою камерою GoPro вам можуть знадобитися двигуни з ширшим статором для кращого охолодження. Для швидких і чутливих гоночних або фристайл-дронів краще використовувати більш високі статори.
Ширші статори також дозволяють використовувати більші підшипники, що підвищує ефективність, плавність і довговічність.
Більші статори не завжди кращі. Наприклад, двигуни 2207 можуть працювати з типовими 5-дюймовими гвинтами, але використання набагато важчих двигунів 2506 того ж класу KV може не дати помітних переваг, оскільки вони створюватимуть таку ж тягу з тими ж гвинтами, або навіть забезпечуватимуть гіршу чутливість через вагу. Щоб покращити продуктивність без збільшення ваги, розгляньте двигуни з більшою потужністю KV. Однак двигун 2506 в цьому прикладі, швидше за все, буде краще працювати з 6-дюймовими гвинтами, ніж 2207 через підвищені вимоги до крутного моменту.
Крутний момент двигуна
Двигуни з високим крутним моментом забезпечують швидку зміну обертів і швидший час відгуку, що призводить до зменшення коливань пропелера і швидшого реагування.
Крутний момент двигуна залежить від декількох факторів, зокрема:
Розмір (об'єм) статора
Матеріали: тип магнітів і якість мідних обмоток
Конструкція двигуна: наприклад, повітряний зазор, кількість полюсів тощо.
Оскільки останніми роками двигуни FPV мають схожі технічні характеристики та конструкцію, розмір статора є найпростішим способом кількісного визначення крутного моменту.
Розмір статора можна розрахувати за формулою об'єму циліндра:
об'єм = pi * радіус^2 * висота
Наприклад, об'єм статора двигуна 2207 становить:
pi x (22/2)^2 x 7 = 2660.93
Чим більший об'єм статора, тим більший крутний момент може генерувати двигун. Якщо порівнювати двигун 2306 з об'ємом 2492,85, то двигун 2207 має більший крутний момент.
Вибираючи двигун, порівнюйте об'єм статора і вагу двигуна. За інших рівних умов, легший двигун з однаковим об'ємом є кращим. Отже, чому б не вибрати найбільший з доступних двигунів? Відповідь криється у вазі. Двигуни з більшим об'ємом статора важчі, тому вибір залежить від застосування.
Наприклад, легким дронам не потрібно багато газу, щоб утримуватися в повітрі, і вони мають більше крутного моменту. У парі з пропелерами з меншим кроком двигуни можуть обертати їх з меншим крутним моментом. У цьому випадку вимоги до крутного моменту двигуна є низькими, що дозволяє використовувати менші та легші двигуни, які зменшують загальну вагу.
Єдиний випадок, коли менш потужний двигун (з меншим крутним моментом) є кращим - це коли плавність роботи є пріоритетнішою за швидкість реакції. Двигуни з високим крутним моментом можуть змінювати швидкість обертання так швидко, що можуть здаватися рваними і менш плавними. Вони також можуть створювати більше стрибків напруги і електричних перешкод в електромережі, що потенційно може вплинути на роботу гіроскопа і загальну продуктивність польоту, якщо фільтрація перешкод не є оптимальною, що призводить до коливань.
KV
"KV" вказує на кількість обертів на хвилину (об/хв), які робить двигун, коли на нього подається 1V (один вольт) без жодного навантаження (наприклад, пропелера), приєднаного до двигуна. Наприклад, двигун 2300KV, що живиться від 3S LiPo батареї (12,6 В), буде обертатися зі швидкістю приблизно 28 980 об/хв без встановлених пропелерів (2300 x 12,6). KV - це, як правило, приблизна оцінка, вказана виробником двигуна.
Коли на двигун встановлений пропелер, швидкість обертання різко зменшується через опір повітря. Двигуни з більшим KV намагатимуться обертати пропелер швидше, створюючи більшу тягу і потужність (споживаючи при цьому більше струму). Більші пропелери зазвичай працюють в парі з двигунами з низьким KV, в той час як менші, легші пропелери краще працюють з двигунами з високим KV.
KV двигуна визначається кількістю витків обмотки з мідного дроту в статорі. Загалом, більша кількість витків обмотки зменшує KV двигуна, тоді як менша кількість витків збільшує його. Магнітна сила магнітів також може впливати на значення KV, причому сильніші магніти його збільшують.
Якщо двигун з високим KV працює в парі з надто великим пропелером, він намагатиметься обертатися швидше, ніж з меншим пропелером, вимагаючи більшого крутного моменту. Цей підвищений крутний момент призведе до більшого споживання струму і виділення тепла. Перегрів може призвести до перегорання двигуна, оскільки покриття котушки може розплавитися і викликати електричне коротке замикання всередині двигуна. Ось чому двигун з більшим KV, швидше за все, працюватиме гарячіше, ніж двигун з меншим KV того ж розміру.
KV також впливає на обмеження струму та напруги двигуна. Двигуни з вищим KV мають коротші обмотки та менший опір, що зменшує максимальну номінальну напругу та збільшує струм, який споживає дует двигуна та пропелера. Однак на сторінці продукту двигуна буде вказано допустиму напругу і максимальний струм.
Обмеження "Потужність двигуна" в Betaflight дозволяє зменшити сигнал двигуна і використовувати батареї вищої напруги (наприклад, літати з 4S двигунами на 6S батареї). Однак, хоча цей обхідний шлях може спрацювати, він потенційно може вивести з ладу ваш ESC при використанні двигунів з високим KV. Обмежуючи потужність двигуна, ви встановлюєте обмеження на те, як довго MOSFET залишається увімкненим, але ви все одно піддаєте двигун більш високій напрузі. Це з більшою ймовірністю призведе до проблем, ніж використання двигуна з меншим значенням KV, розрахованого на вищу напругу. Рекомендується вибирати KV у двигунах відповідно до напруги батареї, яку ви плануєте використовувати.
KV проти постійного крутного моменту
KV двигуна безпосередньо не впливає на крутний момент, але впливає на константу крутного моменту. Постійний момент двигуна визначає, який струм необхідний для створення певного крутного моменту. KV не впливає на фактичний крутний момент; такі фактори, як сила магніту, повітряний зазор і опір котушки, мають набагато більший вплив на створення крутного моменту.
Двигуни з вищим KV мають вищу константу крутного моменту, що означає, що їм потрібен більший струм для створення однакового крутного моменту порівняно з двигунами з нижчим KV. Для створення однакового крутного моменту двигун з вищим KV потребує більше струму, що призводить до додаткових втрат в ESC, акумуляторі та дротах. Крім того, в двигуні накопичується більше тепла через більший струм, генерується менший магнітний потік. Загалом, двигун з вищим KV менш ефективний, якщо ви летите з тією ж швидкістю, що і двигун з нижчим KV.
Тому не варто перегинати палку з KV; намагайтеся дотримуватися поміркованості. Це особливо важливо для довгих польотів, для яких пріоритетами є ефективність і час польоту.
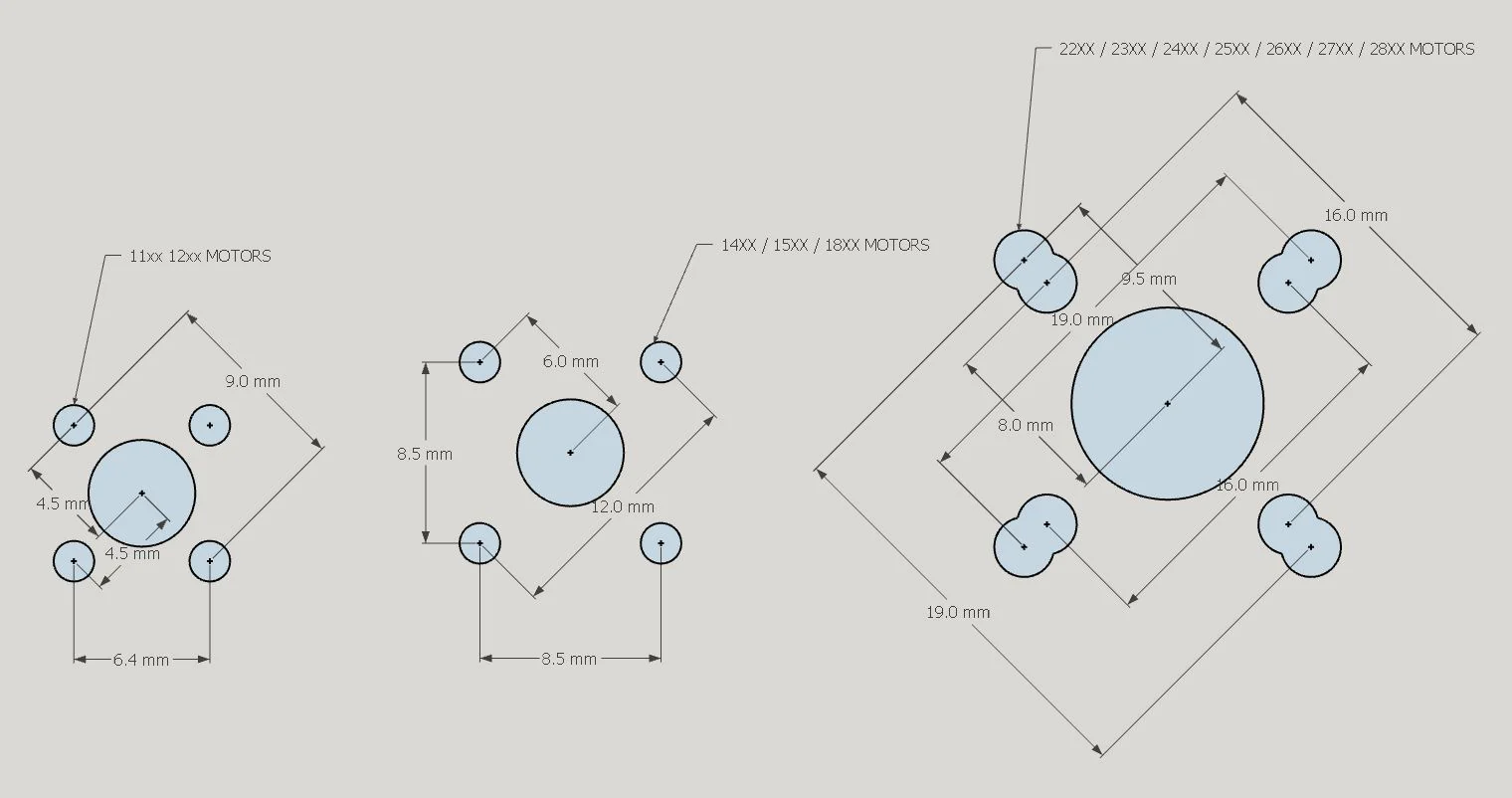
Кріплення двигуна
Найпоширеніші схеми кріплення (відстань між отворами) для двигунів 22xx, 23xx, 24xx - 16x19мм і 16x16мм. Сучасні рами 5" FPV дронів повинні підтримувати обидві схеми. У фіксуючі отвори цих двигунів використовуються гвинти M3. Використовуйте гвинти з довжиною різьби на 2мм більше, ніж товщина кронштейнів; наприклад, для 5мм кронштейнів використовуйте 7мм гвинти, а для 6мм кронштейнів - 8мм гвинти. Після того, як встановили мотори, перевірте, що б гвинти не врізалися в обмотку двигуна. Інакше це може вивести мотор із ладу.
Полюси та магніти
Переглядаючи двигуни для вашого FPV-дрона, ви можете натрапити на такі специфікації, як "12N14P", надруковані на коробці. Ось що означають ці цифри: число перед літерою "N" вказує на кількість електромагнітів (полюсів) у статорі, а число перед "P" - на кількість постійних магнітів у дзвоні.
Різні типи розмірів двигунів мають різну кількість полюсів; наприклад, двигуни 22XX і 23XX зазвичай мають 12 полюсів і 14 магнітів.
Кількість полюсів безпосередньо впливає на продуктивність двигуна. Якщо полюсів менше, ви можете використовувати більше заліза в статорі, що призведе до більшої вихідної потужності. Однак більша кількість полюсів призводить до більш рівномірного розподілу магнітного поля. Це, в свою чергу, забезпечує плавнішу роботу двигуна з більш точним контролем над обертанням дзвону.
Якщо коротко:
Більше полюсів = більш плавна робота
Менше полюсів = більша потужність
Оскільки двигуни дронів FPV зазвичай 3-фазні, конфігурація полюсів повинна бути кратною 3 (тобто 9, 12, 15, 18 і т.д.). Це пов'язано з наявністю 3 проводів, що підключаються до двигуна. Отже, кількість полюсів не так легко змінити і не є критичним фактором при виборі двигунів, особливо для FPV-дронів. Але ви повинні звернути увагу на номер полюса, оскільки ви повинні ввести цей номер в Betaflight, коли вмикаєте фільтр обертів. Якщо ви не можете знайти це число, ви можете просто порахувати, скільки магнітів на дзвоні.

Обмотки двигуна
Кількість мідних обмоток або "витків" на полюсі статора визначає максимальний струм, який може споживати двигун. Водночас товщина дроту впливає на здатність двигуна справлятися зі струмом до досягнення точки перегріву.
Простіше кажучи, менша кількість витків означає менший опір, що призводить до вищого значення KV. Однак це також призводить до зменшення електромагнітного поля на статорі і, як наслідок, до зниження крутного моменту.
З іншого боку, коли в котушці більше витків, більша кількість міді створює значніше магнітне поле на полюсі статора, генеруючи більший крутний момент. Але є нюанс - довші дроти і більший опір призводять до зниження KV двигуна.
Отже, як виробники вирішують ці проблеми, підвищуючи потужність двигунів FPV-дронів? Відповідь полягає у збільшенні кількості обмоток, використовуючи при цьому товстіші мідні дроти. Цей геніальний підхід ефективно зменшує опір обмотки, тим самим підвищуючи потужність без шкоди для ефективності та крутного моменту. Крім того, двигун з більшим перерізом дроту може витримувати більший струм, не перегораючи.
Однак важливо зазначити, що використання товстіших проводів і додаткових обмоток призводить до збільшення ваги двигуна. Крім того, обмотка займає більше фізичного простору, що вимагає більшого статора. Ось чому ми спостерігаємо появу на ринку більших і важчих двигунів, що також пояснює їх підвищену потужність.

Багатожильні та одножильні обмотки
Коли мова йде про обмотки електродвигунів, є два основних варіанти: одножильні та багатожильні. Кожен з них має свій власний набір переваг і недоліків, що робить їх придатними для різних застосувань.
В одножильних обмотках використовуються товстіші дроти, які ефективніше відводять тепло, що робить їх ідеальними для складних польотів, які вимагають великої потужності (наприклад, перегони, акро, фрістайл тощо). Однак товстіші дроти призводять до збільшення проміжків між ними, що обмежує кількість обмоток, які можна намотати на статор.
З іншого боку, багатожильні обмотки замінюють один товстий дріт на кілька тонших. Ці тонші дроти не так ефективно переносять тепло і більш схильні до фізичного пошкодження.
Незважаючи на ці обмеження, багатожильні обмотки можуть мати кращі характеристики, ніж одножильні, завдяки більшому ущільненню навколо статора з меншими проміжками між дротами, що призводить до створення сильнішого магнітного поля. Це може призвести до підвищення потужності та ефективності. Однак багатожильний дріт, як правило, складніше зробити таким же охайним, як і одножильний, а в поєднанні з тим, що між багатожильними котушками є більше шарів ізоляції, це призводить до збільшення повітряних проміжків між дротами, що може нівелювати згадані вище переваги.
Важливо відзначити, що охайність обмоток відіграє життєво важливу роль, як з естетичної, так і з електричної точки зору. Неохайні обмотки з численними перехрещеннями дротів призводять до менш ефективних магнітних полів, оскільки дроти перетинають статор не перпендикулярно. Тому, оцінюючи обмотки електродвигунів, не забувайте про важливість охайної і добре організованої роботи з намотування.
Отже, багатожильний дріт може перегріватися швидше, ніж одножильний, що впливає на вихідну потужність і ефективність двигуна. Загалом, одножильна обмотка, ймовірно, є кращим вибором на практиці.
Продовження статті
