notes on tuesday
NAPĘD ELEKTRYCZNY
Zespół połączonych ze sobą i oddziałujących na siebie wzajemnie elementów przetwarzających energię elektromechaniczną w procesie technologicznym.
Elementy napędu elektrycznego:
- układ zasilający – przekształca energię elektryczną pobieraną z sieci albo generuje ją i dostarcza ją do silnika – np. prostownik sterowany,
- silnik elektryczny – przekształca doprowadzoną energię elektryczną na energię mechaniczną,
- urządzenie pędne – przekazuje energię mechaniczną wytworzoną przez silnik do maszyny roboczej, może także zmieniać parametry przekazywanej energii mechanicznej, tj. moment, prędkości kątowej,
- urządzenia sterowania i automatyki – stosowane napęd ma być sterowany automatycznie
Napęd elektryczny zasila z reguły maszynę roboczą, która jest odbiornikiem energii mechanicznej wytwarzanej przez napęd.
HAMOWANIE SILNIKA INDUKCYJNEGO
Potrzeba hamowania występuje w dwóch przypadkach: gdy chodzi o zatrzymanie maszyny będącej w ruchu lub utrzymanie stałej prędkości czy jej ograniczenie. Silniki indukcyjne można hamować jednym z poniżej podanych sposobów:
1. hamowanie wybiegiem - stosuje się w napędach małej mocy, gdzie czas hamowania nie ma istotnego znaczenia, a ze strony urządzenia napędzanego nie występuje moment napędowy. Hamowanie wybiegiem polega na tym, że po wyłączeniu zasilania silnika, hamowany jest on jedynie poprzez tarcie w łożyskach i przekładniach.
2. hamowanie mechaniczne – najbardziej rozpowszechniony sposób hamowania silników – polega na celowym zwiększaniu tarcia pomiędzy elementem wirującym a dociskanym do niego hamulcem bębnowym. Hamowanie mechaniczne stosowane może być jako jedyne lub jako współpracujące z hamowaniem silnikowym, którym nie zawsze można doprowadzić do całkowitego zatrzymania silnika i urządzenia napędzanego.
3. hamowanie silnikiem (dynamiczne lub przeciwprądem) –elektryczne, jest sposobem najskuteczniejszym, ze względu na to, że wytworzony po przez silnik moment hamujący może być równy, a często i większy od momentu znamionowego silnika. Silnik elektryczny hamowany tym sposobem może być więc hamowany bardzo szybko. Hamowanie silnikowe może być realizowane dynamicznie – prądem stałym lub przemiennym jednofazowym, albo przeciwprądem.
Zasada dynamicznego hamowania silnika indukcyjnego prądem stałym polega na odłączeniu uzwojenia stojana od sieci trójfazowej i przyłączeniu tego uzwojenia do źródła napięcia stałego. Zasilane prądem stałym uzwojenie stojana wytwarza w szcze-linie silnika nieruchome pole magnetyczne. W uzwojeniach fazowych wirnika wirują-cego w tym polu są indukowane siły elektromotoryczne, wywołujące przepływ prą-dów fazowych wirnika. Wzajemne oddziaływanie pola magnetycznego w szczelinie silnika i prądów fazowych wirnika powoduje wytwarzanie momentu elektromagne-tycznego skierowanego zawsze przeciwnie do kierunku prędkości wirnika. Podczas hamowania do silnika jest doprowadzana energia mechaniczna, która jest zamieniana na energię strat mocy wytracanej na rezystancjach uzwojeń fazowych wirnika.
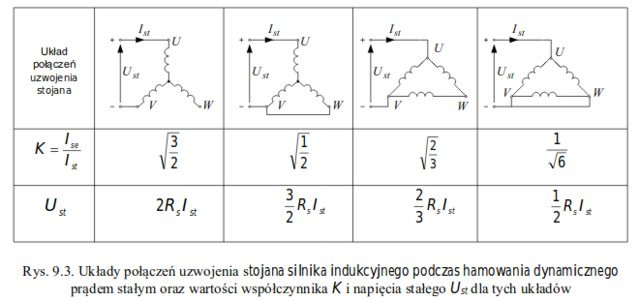
Przy hamowaniu dynamicznym prądem stałym silnika asynchronicznego wytwarzany jest poprzez stały prąd stojana stały w czasie i przestrzeni strumień magnetyczny. Strumień ten indykuje w wirujących uzwojeniach wirnika siłę elektromotoryczną, która powoduje w zamkniętym jego uzwojeniu przepływ prądu. Prąd ten współdziałając ze strumieniem stojana daje, zgodnie z regułą Lenza, efekt hamowania wirnika. Tak hamowany silnik indukcyjny można porównać z generatorem synchronicznym pracującym przy zmiennej częstotliwości. Uzwojenie wirnika silnika indukcyjnego spełnia analogiczną rolę, jak obwód obciążenia generatora. Przy tym hamowaniu silnik nie może być wyhamowany do końca, jeśli w chwili rozpoczęcia hamowania silnika urządzenie napędzane staje się urządzeniem napędzającym. W takim przypadku ustala się pewna prędkość obrotowa silnika pracującego hamulcowo, będąca równowagą momentów: napędzającego i hamującego. Aby całkowicie zatrzymać urządzenie będące w ruchu należy „dohamować” je mechanicznie.
Poprzez zmianę tych wielkości (strumienia i rezystancji dodatkowej R d wtrąconej w obwód wirnika) można wpływać na przebieg hamowania. Na strumień można wpływać poprzez zmianę prądu, lub zmieniając sposób połączenia uzwojeń stojana przy hamowaniu.
Przy hamowaniu dynamicznym prądem przemiennym jednofazowym wytworzone w stojanie pole magnetyczne jest polem pulsującym, które rozkłada się na składowe: zgodną i przeciwną. Istotnym warunkiem przy tym sposobie hamowania jest to, aby rezystancja wtrącona w obwód zapewniała poślizg krytyczny większy od jedności.
Ten sposób hamowania, ze względu na pulsujący charakter pola magnetycznego jest dużo mniej skuteczny od hamowania dynamicznego prądem stałym – przy którym wytwarzane jest stałe pole magnetyczne.
Hamowanie przeciwprądem silnika asynchronicznego polega na wytworzeniu przez uzwojenie stojana strumienia magnetycznego wirującego przeciwnie do aktualnego kierunku obracania się silnika. Wytworzenie takiego strumienia jest spowodowane zamianą miejscami dwu faz zasilających stojan. Strumień ten powoduje wytworzenie w uzwojeniach wirnika siły elektromotorycznej, pod wpływem której w uzwojeniach tych płyną prądy o dużych wartościach. Z uwagi na to, że pola magnetyczne stojana i wirnika wirują przeciwnie względem siebie, to wytwarzają efekt silnego hamowania. Na przebieg hamowania przeciwprądem silnika pierścieniowego można wpływać poprzez zmianę rezystancji dodatkowej R d wtrąconej w obwód wirnika lub przez zmianę układu połączeń obwodu stojana (gwiazda lub trójkąt). Pierwszy sposób nie powoduje zmian wartości momentu – zmienia jedynie wartość poślizgu krytycznego, przy którym występuje maksimum momentu. Hamowanie przeciwprądem występuje w zakresie poślizgu większego od jedności.
4. Hamowanie odzyskowe. Maszyna indukcyjna pracująca przy prędkości nadsynchronicznej (s<0) może być wykorzystana do celów hamowania. Hamowanie to nie jest możliwe przy prędkości mniejszej niż synchroniczna, co znacznie ogranicza zakres stosowania tego sposobu hamowania. W czasie pracy z prędkością większą od synchronicznej maszyna wiruje w jednym kierunku a moment elektromagnetyczny działa w kierunku przeciwnym co świadczy o pracy hamulcowej. W czasie hamowania energia kinetyczna układu jest zamieniana w energię elektryczną i oddawana do sieci oraz częściowo tracona w maszynie.
Hamowanie nad synchroniczne, lub inaczej prądnicowe, jest najczęściej spotykanym rodzajem hamowania elektrycznego. Każdy silnik załączony do sieci elektrycznej, jeśli zostanie napędzany przez opadający ciężar lub przez inny rozpędzony mechanizm i przekroczy prędkość synchroniczną, będzie przeciwdziałać wzrostowi obrotów nad synchronicznych, czyli wytwarzać moment hamujący i to tym większy, im większe jest przekroczenie obrotów synchronicznych. Zjawisko to spowodowane jest tym, że silnik napędzany z prędkością nad synchroniczną staje się prądnicą asynchroniczną przetwarzającą energię mechaniczną opadającego ciężaru, lub innego rozpędzonego mechanizmu, w energię elektryczną, którą oddaje do sieci w postaci mocy czynnej, mimo iż sam pobiera nadal z sieci prąd magnesujący (bierny), potrzebny dla wytworzenia pola wirującego. Z tego powodu hamowanie prądnicowe nazywane jest również odzyskowym (odzysk energii).
Przy hamowaniu prądnicowym mamy więc do czynienia z przetwarzaniem energii mechanicznej na elektryczną, oddawaną do sieci, przez co w silniku pracującym jako prądnica asynchroniczna zostaje wywołany moment hamujący, i to tym większy, im większe jest przekroczenie prędkości synchronicznej silnika. Jeśli w obwodzie wirnika nie ma żadnej oporności dodatkowej, to charakterystyka momentu hamującego jest zupełnie podobna do naturalnej charakterystyki silnika, z tą różnicą, że przebiega w kierunkach ujemnych osi współrzędnych.
BADANIE UKŁADU NAPĘDOWEO Z UKŁADEM ŁAGODNEGO ROZRUCHU
Bezpośrednie załączenie silnika klatkowego do trójfazowej sieci prądu przemiennego powoduje gwałtowny wzrost prądu pobieranego przez silnik. Występuje tzw. udar prądu rozruchowego, który przewyższa prąd znamionowy kilkakrotnie (zazwyczaj pięć lub więcej razy) oraz powoduje największe obciążenie mechaniczne wirnika, sprzęgieł, przekładni i przyłączonego obciążenia.
Stosowanie elementów obniżających napięcie przy rozruchu, np. przełącznik gwiazda – trójkąt, autotransformator, niewiele pomaga w tej sytuacji, gdyż wciąż występuje obciążenie udarowe, które powstaje na skutek impulsów prądowych, powodujących powstawanie składowych przejściowych momentu, w chwilach przełączania układu. Występujące obciążenia udarowe są przyczyną, skrócenia czasu eksploatacji elementów układu oraz podwyższają koszty eksploatacji i utrzymania.

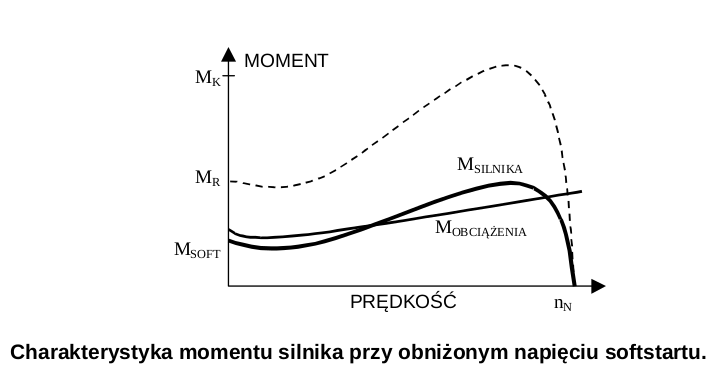
Softstart to urządzenie energoelektroniczne pozwalające ograniczyć prąd rozruchowy poprzez ograniczenie wartości napięcia zasilającego:
U SILNIK =U ZASILANIE −U SOFT
Softstart pozwala użytkownikowi na sterowanie wartością prądu rozruchu silnika elektrycznego praktycznie od wartości minimalnej, wymaganej przy rozruchu, oraz na utrzymywanie prądu rozruchu na takim poziomie jaki jest najbardziej odpowiedni dla warunków rozruchu i przyłączonego do silnika obciążenia. Dzięki takiemu działaniu urządzenia możliwa jest też regulacja przepływu energii potrzebnej do osiągnięcia przez silnik nominalnej prędkości roboczej oraz obniżenie do minimum obciążenia mechanicznego układu napędowego.
Najważniejszą częścią są tyrystory. Poza nimi układ miękkiego startu składa się jeszcze z płytki z drukowanym obwodem (PCBA), służący do kontroli, układu chłodzenia, transformatora prądu oraz obudowy, w której czasem jest ekran LCD i panel sterujący.
Wspomniane tyrystory są elementami półprzewodnikowymi, które zwykle mają działania izolujące, jednak pod wpływem sygnału startowego mogą przewodzić prąd. Podczas rozruchu tyrystory przepuszczają coraz więcej napięcia, zgodnie z zaprogramowaną charakterystyką. Po pewnym czasie przewodzą już 100% - urządzenie kończy fazę rozruchu i działa w sposób ustalony. Softstart sprawia, że prąd rozruchowy jest niższy, co umożliwia uniknięcie spadku napięcia w sieci.
Na rysunku poniżej przedstawiono trzy podstawowe fazy występujące w pełnym cyklu pracy softstartu:
- Liniowe narastanie napięcia - układ otwartej bądź zamkniętej pętli,
- Faza ustalona (plateau),
- Optymalizacja zużycia energii.


Po dostarczeniu do układu sygnału do rozpoczęcia pracy oprogramowanie systemowe wymusza najpierw ustalone opóźnienie o długości 3-400 ms, podczas którego układ sam się testuje. Dopiero po upływie czasu opóźnienia, napięcie jest podawane na zaciski silnika w celu wytworzenia momentu rozruchowego.
Następnie układ zaczyna zwiększać liniowo napięcie, w wyniku czego napięcie na zaciskach silnika zaczyna łagodnie narastać od napięcia piedestału do napięcia maksymalnego. Na końcu fazy liniowego narastania napięcia, napięcie podawane na zaciski silnika za pośrednictwem bloków tyrystorowych równe jest napięciu podawanemu z sieci.
Faza ustalona - plateau - rozpoczyna się w chwili, w której napięcie wyjściowe osiąga wartość maksymalną równa napięciu zasilania. Czas trwania równy jest wybranemu czasowi liniowego narastania, lub wynosi w przybliżeniu 10 s gdy czas liniowego narastania jest krótszy od 10 s.
Podczas fazy ustalonej napięcie na zaciskach silnika ma wartość stałą, co pozwala układowi silnik – obciążenie na osiągnięcie stanu ustalonego, po zakończeniu przyspieszania w pierwszej fazie rozruchu, przed wkroczeniem w fazę optymalizacji zużycia energii.
Podczas fazy narastania liniowego, oprogramowanie systemowe wyznacza wzorcową wartość współczynnika mocy. Po przejściu do fazy optymalizacji wartość wzorcowa jest przez cały czas porównywana z bieżącą wartością współczynnika mocy. Analizując sygnał wyjściowy z komparatora, program przez cały czas wyznacza, dostraja i aktualizuje punkty zapłonu tyrystorów, tak by ilość energii dostarczanej do silnika odpowiadała aktualnemu momentowi na wale silnika, a nie była zużywana na wytwarzanie dodatkowego strumienia magnetycznego. Współczynnik mocy na zaciskach wejściowych silnika utrzymywany jest przez to na najwyższym możliwym poziomie dla każdych warunków obciążenia.